How to use VRX on UBUNTU20.04 and ROS1? 1.Prepare your environment 2.Download source code 3.Before started, you should have a basic familiarity with the ROS environment and Gazebo. 4.Build 5.Error1 6.Launch
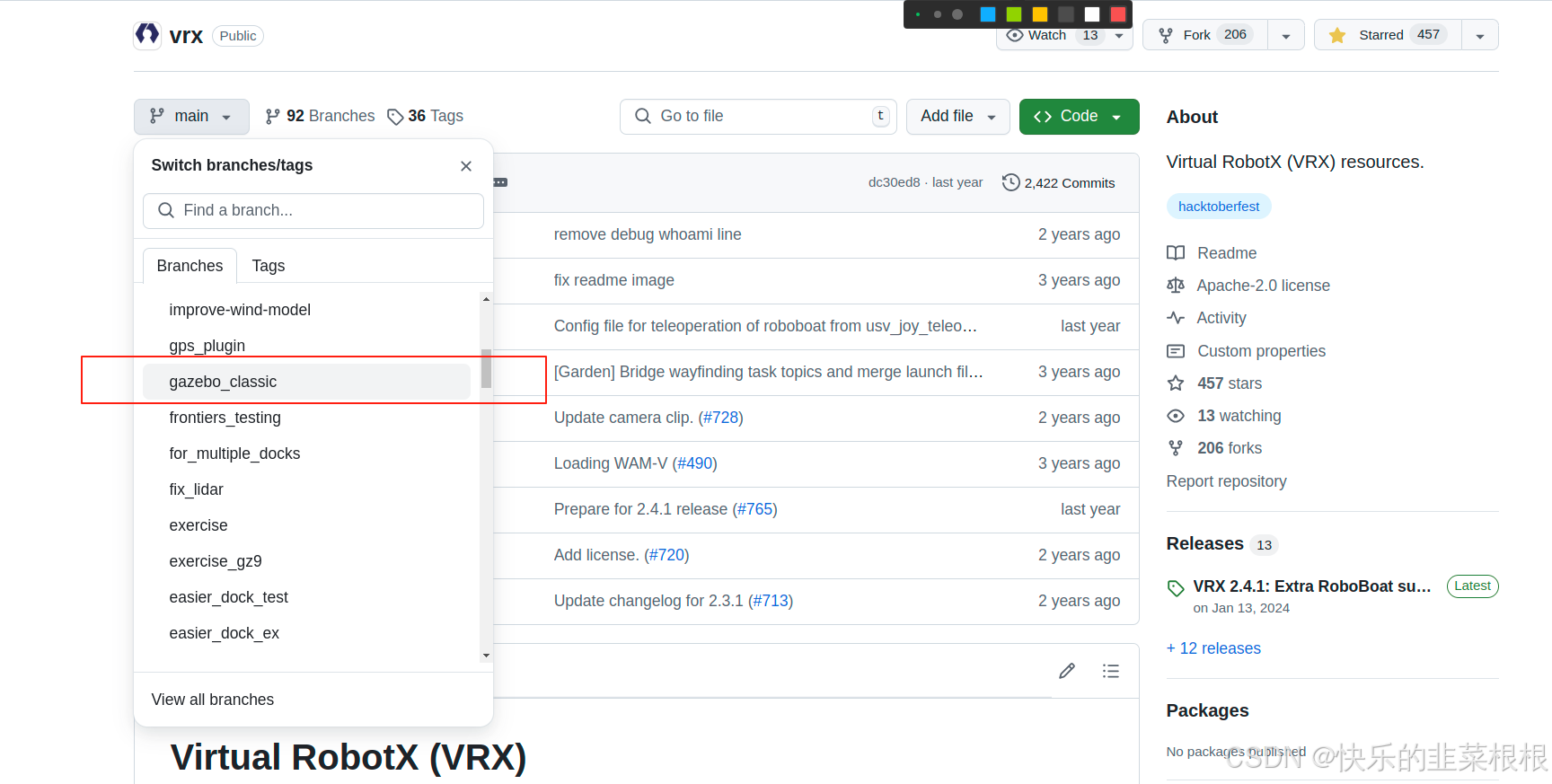
download the gazebo_classic branch git clone https://github.com/osrf/vrx -b gazebo_classic
catkin_make
catkin build cora_description usv_msgs wamv_description vorc_gazebo wamv_gazebo cora_description vrx_2019 wave_gazebo usv_gazebo_plugins vrx_gazebo wave_gazebo_plugins
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 ( find_package) : Could not find a package configuration file provided by "geographic_msgs" with any of the following names: geographic_msgsConfig.cmake geographic_msgs-config.cmake
sudo apt-get install ros-noetic-geographic-msgs
cd the path of launch files export LIBGL_ALWAYS_SOFTWARE = 1
roslaunch vrx_gazebo vrx.launch