
一、有刷直流电机
1.1实验现象
主要是使用到实战板右边沿三个电机最上面的那一个,板子上已经集成了驱动(就在电机接口旁边的那个芯片),可以直接接电机。
1.1.1串口助手
通过与 4 个按键的匹配实现电机的启停、正反转、加速、减速。在烧录程序、复位后电脑上串口助手的显示以下页面,表示用户可以通过以下的按键操作电机的工作。
1.1.2增加、减小占空比
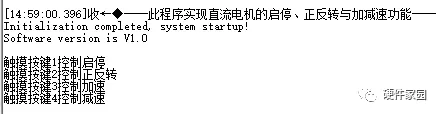
按下按键 1 ,电机启动,默认 PWM 波的占空比是 50% 。
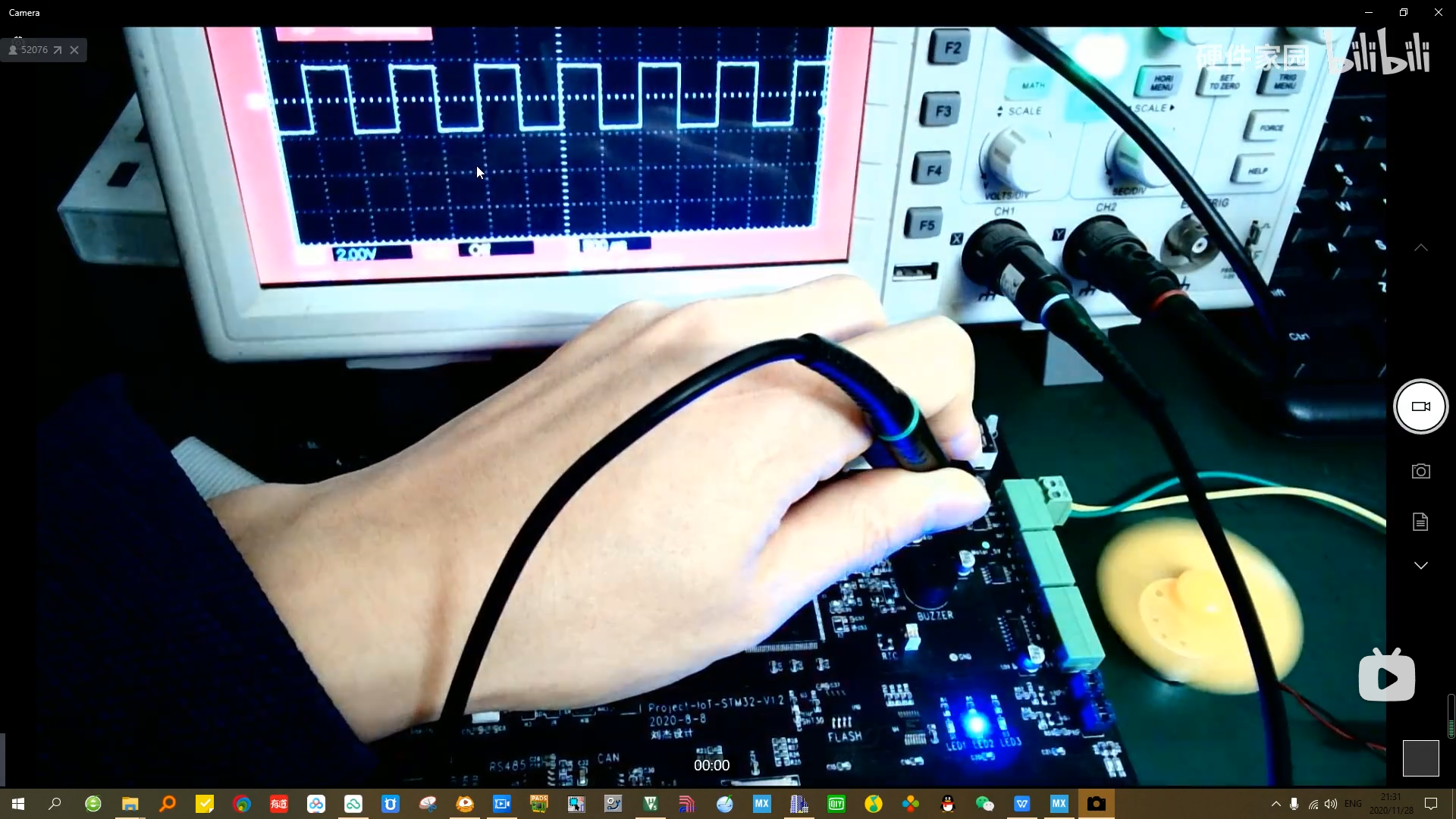
按下按键 3 ,增大占空比,电机开始加速。
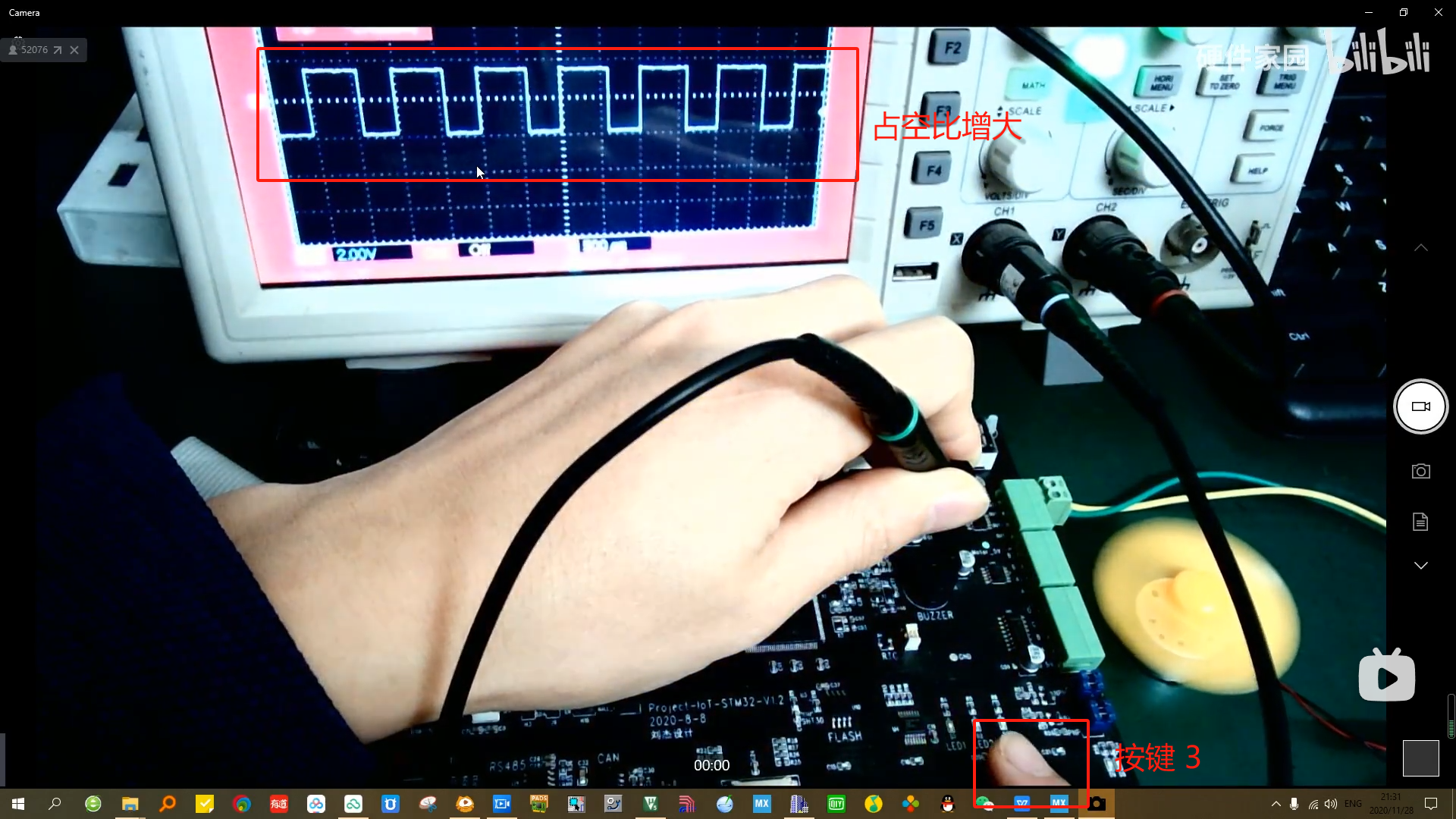
占空比越大,电机的速度越快。下图是占空比更大。
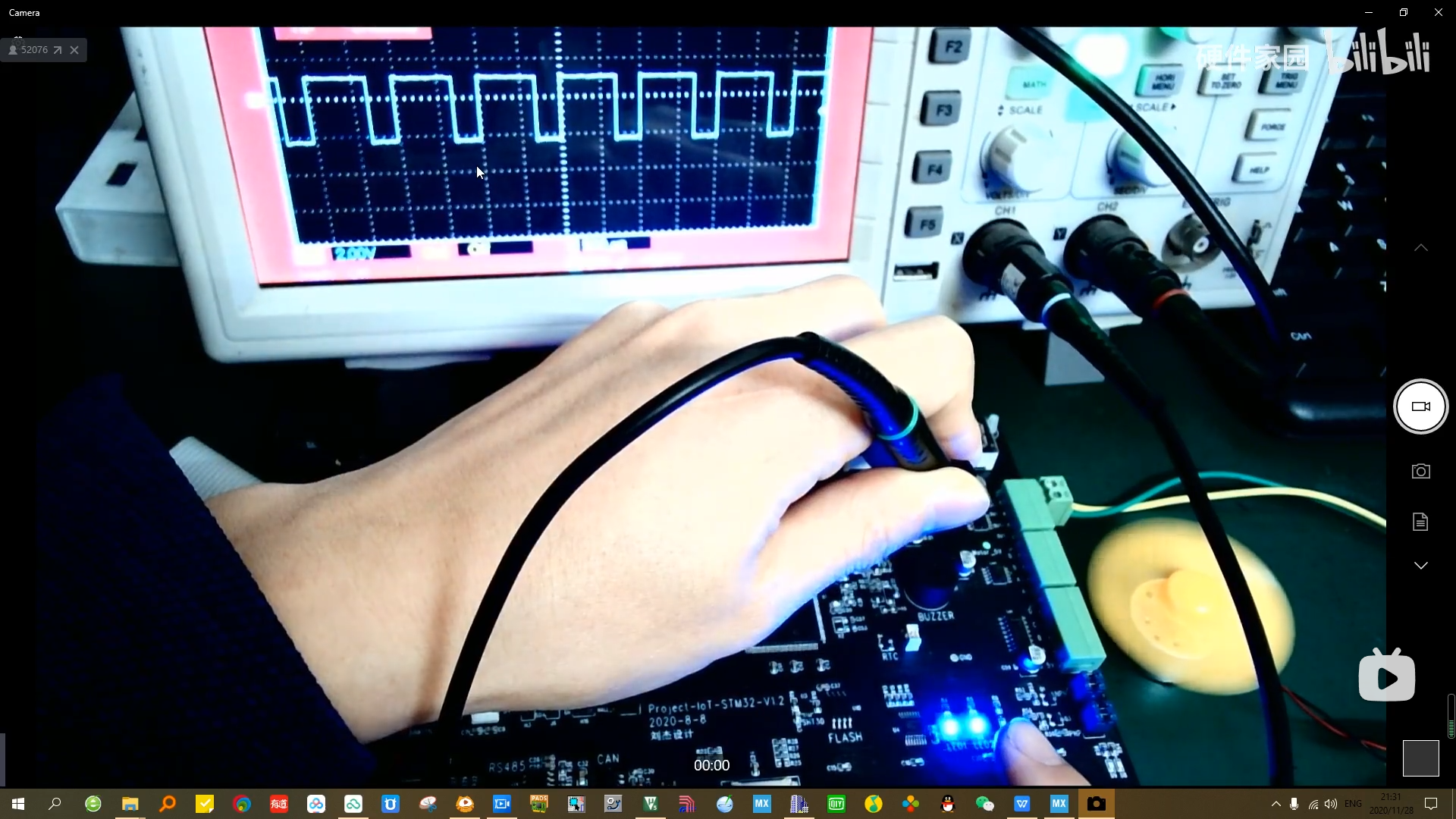
下图是 PWM 波的占空比达到最大,在下图中,PWM 波的波形中没有低电平,完全输出高电平。
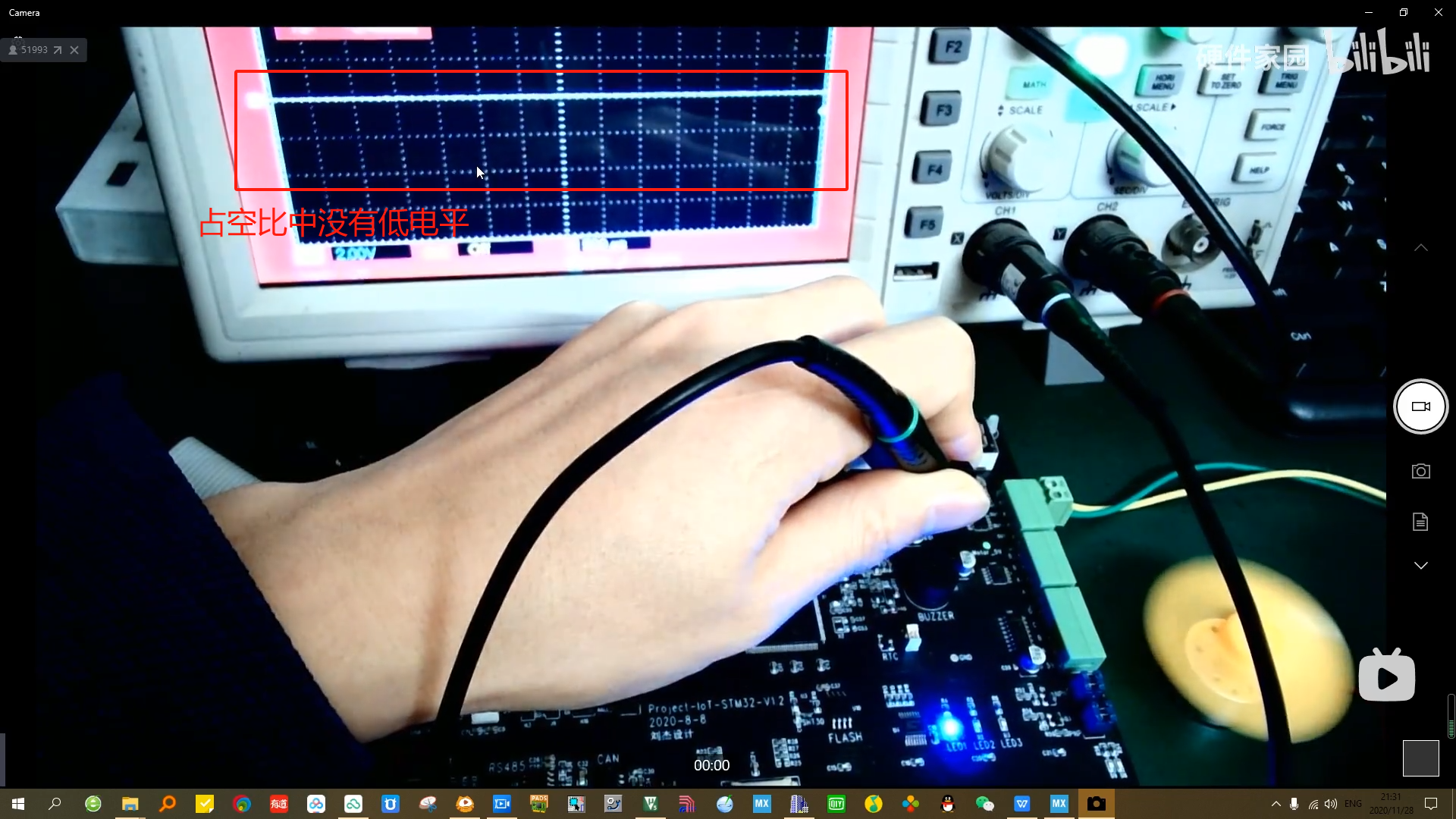
在本实验中占空比最低就是 50% ,设置了不能再低,因为这个电机的缘故,可能再低,电机就不转了。
1.1.3正反转
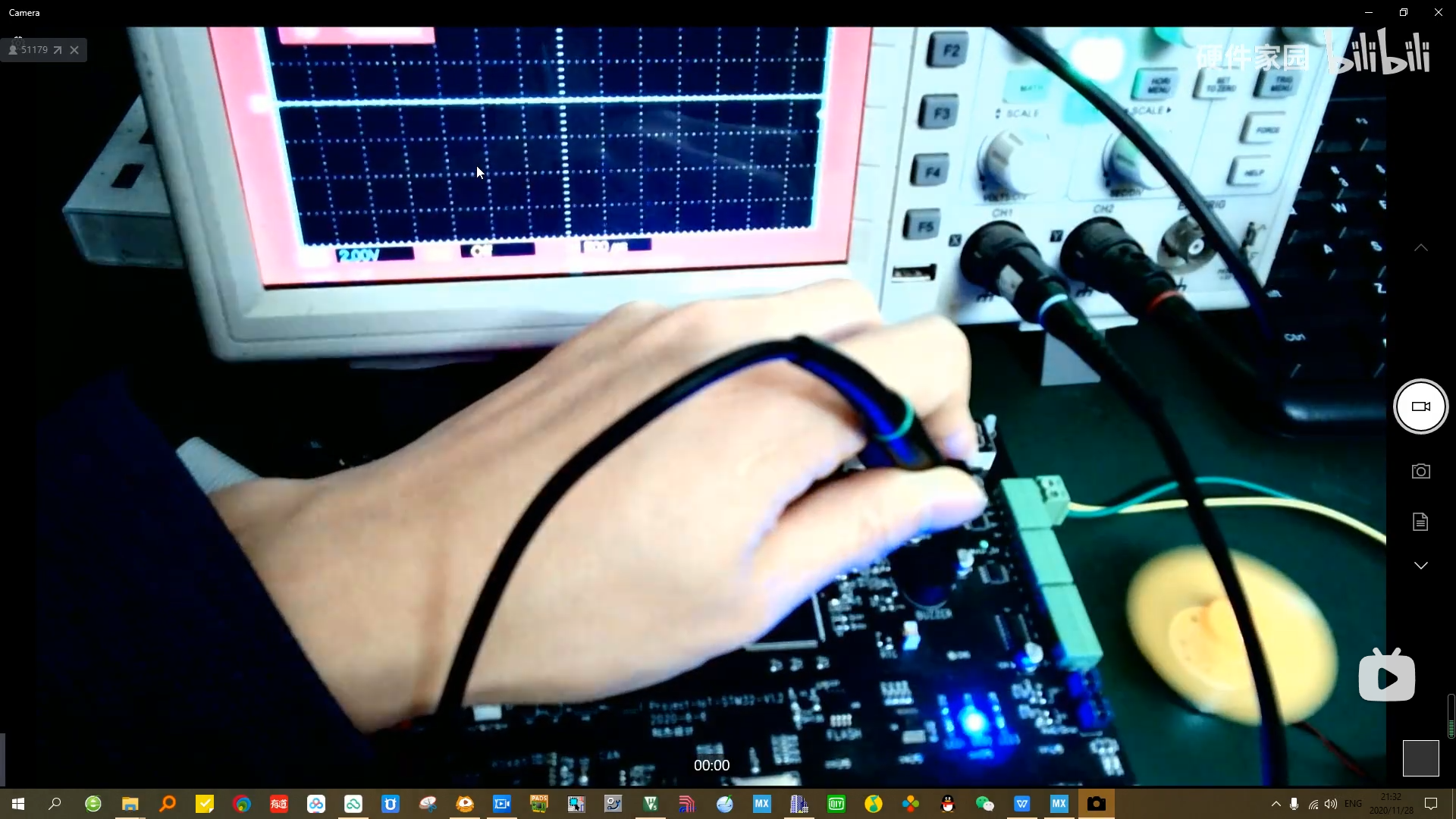
在原本正转、示波器测量点不变的时候,按下按键 2 ,发现电机直接反转,测量点的那一路波形直接变成低电平,如下图所示。
这个时候在另外一路上,如果去测量波形的话,输出的波形就是像上面那样的 PWM 波了。
所以这里有 4 个接口,每一个电机需要两路接口来控制正转和反转,该板子这里可以一次接两个电机。
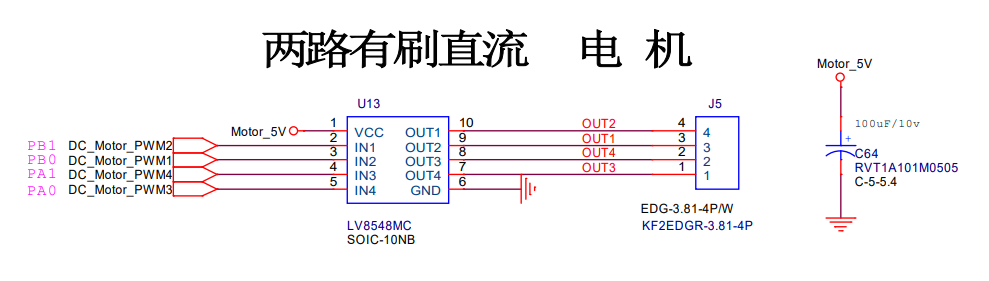
1.2硬件电路
左边是单片机的接口,通过中间的驱动 IC 来直接接右边的电机(接口),最右边是电容,给后面的电机提供能量的一个电容,这个电容一般要比较大,不然纹波会比较大。
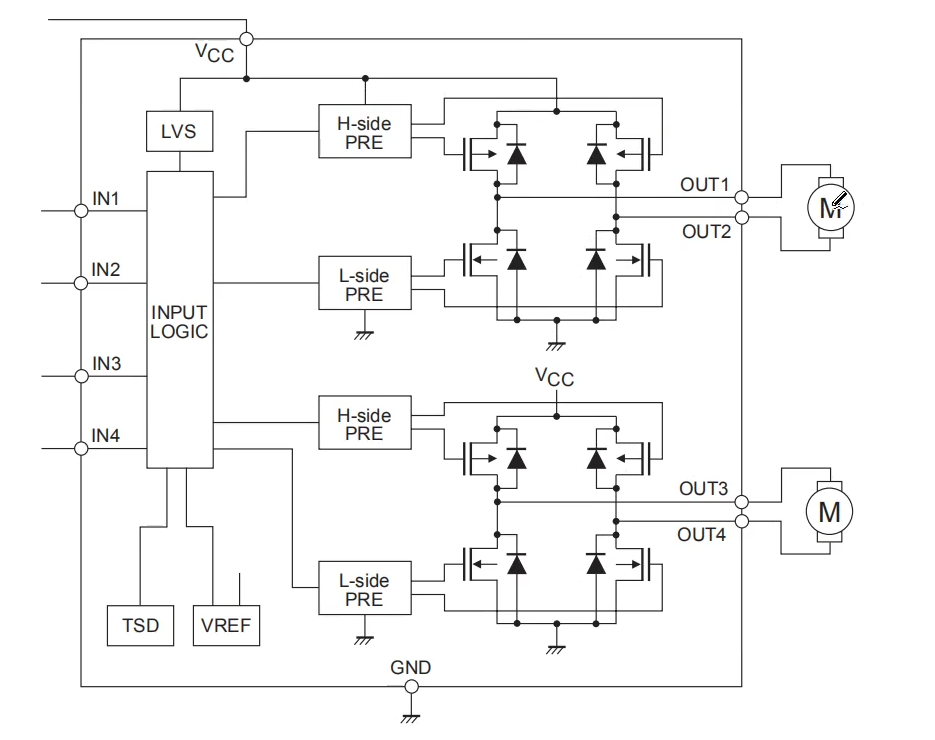
驱动芯片内部是有两个 MOS 管全桥,上面一个,下面一个,因为是全桥驱动,所以才可以控制电机的正转和反转。在我们的输入处只需要提供高低电平就可以。
1.3直流电机
直流电动机是能将直流电能转换成机械能的旋转电机。我们在电机选型的时候,需要考虑以下几个方面:
- 尺寸,因为无论什么电机都需要考虑机械结构,比如说电机安装在什么尺寸的壳里。
- 扭力,电机能不能带动后续的负载。
- 驱动电压,直流电机是由直流电压直接控制的,一般有 5V 、12V 、24V 的常用电压,需要仔细选择。
- 驱动电流,电流和电压决定电机的功耗,一般功率越大,扭力就越大。在选择驱动 IC 时, 必须能满足这个驱动电流和驱动电压才能够驱动。
1.4驱动方式
驱动方式要根据客户、使用场景的需求来定。
1.4.1驱动方式一
只能打开或关闭,不能变速与换向,用继电器,BJT 或 MOS 开关控制通断即可。
就是单片机的一个 IO 口过来,控制一个继电器,继电器接一个电机,只要控制继电器的通断即可。
1.4.2驱动方式二
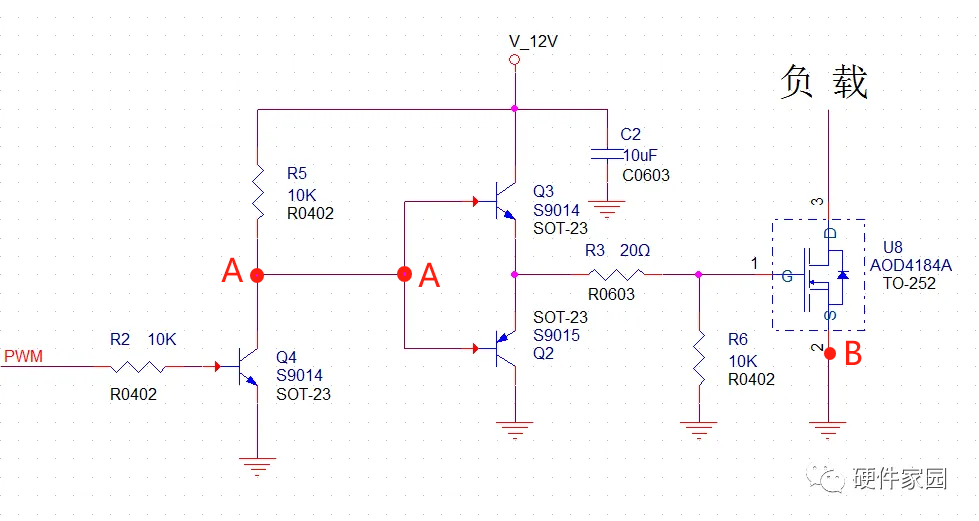
可以打开或关闭,可以变速,但不能换向,用 PWM 控制电子开关即可,如下图,简单介绍一下。
输入一个 PWM 波,输出一个负载电机 M ,接一个适配电源(假设是 5V )。
当 PWM 波输入一个高电平,Q4 导通,A 点的电平被拉低,大致电位约为 0.1V,上面的三极管 Q3 截止。U8 为一个 MOS 管,当它工作的时候,栅极是需要电压的,比如工作电压需要 12V,另外 G 点对地是有一个寄生电容的,寄生电容通过电阻 R3 和 Q2(导通时)进行放电,但是只能将电位放到 0.7V 就无法进行放电了,因为到 0.7V 后三极管就截止了,小于 0.7V 后的电位通过电阻 R6 进行放电,这样一来,U8 栅极的电压可以放到 0V ,0V 后 MOS 管关闭,电机就停止了。
当 PWM 波输入一个低电平,Q4 截止,A 点的电位就是上面的电源,接近 12V ,下面的三极管 Q2 截止,上面的三极管 Q3 导通。Q3 导通之后,12V 的电源通过 电阻 R3 对上面提到的栅极电容进行充电,MOS 打开,电机就开始工作。
综上所述,电机就工作在 PWM 波模式,改变占空比就可以改变电机的速度。
对电路的改进还包括,在 B 下面对地接一个反馈电阻,B 点引出来进行 AD 采样,实现对驱动电流进行检测,既可以保护又可以检测。
除了控制 PWM 波形之外,还可以改变电机的驱动电压(比较麻烦)也可以达到变速的目的,比如用那种旋钮式的,电压从 0~24V 来驱动一个电机,但是现在比较流行的方式还是控制 PWM 波。
1.4.3驱动方式三
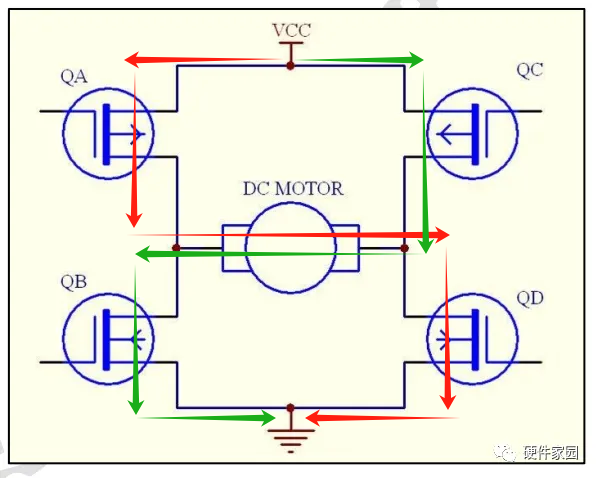
可以打开或关闭,可以变速,也可以换向,用PWM控制桥路,如下图,解释如下:
上面只是使用了一个 MOS 管,如果需要换向的话,就需要使用 4 个 MOS 管,对于用 4 个 MOS 管控制往往就替换成用 IC 控制,因为如果像上面那样用三极管电路来控制的话,电路就比较冗余,所以一般使用集成 IC(内部集成了可以直接控制的 4 个 MOS 管) ,本项目就使用的一个集成 IC 芯片 8548。
当 QA 和 QD 导通,QC 和 QB 截止之后,电流从左向右流过电机,如下图中红色箭头所示。
当 QB 和 QC 导通,QA 和 QD 截止之后,电流从右向左流过电机,如下图中蓝色箭头所示。
通过桥路,可以改变驱动电流的方向,进而改变电机转动的方向。
在之前的蜂鸣器实验中,也是控制 PWM 波,不过在蜂鸣器实验中控制改变 PWM 波的频率, PWM 波的占空比不变。
在本次实验中,不改变 PWM 波的频率而是改变波形的占空比,既然在这个过程中频率是固定的,那我们不妨先来考虑频率应该等于多少比较合适。
在查阅资料的时候,发现比较合适的说法是:频率建议 6~16KHz(当然是可以根据不同的项目的情况调整的,我们也可以使用 1K 的频率)。在 PWM 波的驱动中,实际是用 PWM 的高低电平来驱动。在 PWM 波的低电平时,电机在这个短暂的时间里是没有驱动电流的,转动靠的是电机的惯性,当 PWM 波的频率太低了,因为低电平停止的时候就比较长,导致电机的震动比较大,而且电机存在卡一下,卡一下的隐患。
如果 PWM 波的频率太高,高低电平切换比较频繁,会导致电机的 EMC 会比较大 ,电机的“力量”可能也会不那么大。
所以控制电机的 PWM 波的频率需要在实际的情况中进行调试,在保证需求的情况下使频率约低越好,但是要保证电机不会震动,正常的转动。
二、单极性步进电机
单极性步进电机的电流只有一个方向,控制起来比较简单;双极性步进电机的电流有两个方向,需要一个桥路来控制,驱动起来复杂一点。









 "【C++/STL】vector(常见接口、模拟实现、迭代器失效)")


