
目录
一、CubeMX配置
二、获取uc-os源码
三、代码移植
四、代码修改
五、总结
六、参考资料
一、CubeMX配置
首先进入CubeMX,,新建工程,选择STM32F103C8T6芯片,照例配置好RCC和SYS。 然后配置GPIO输出,这里选择PA5和PA7引脚。
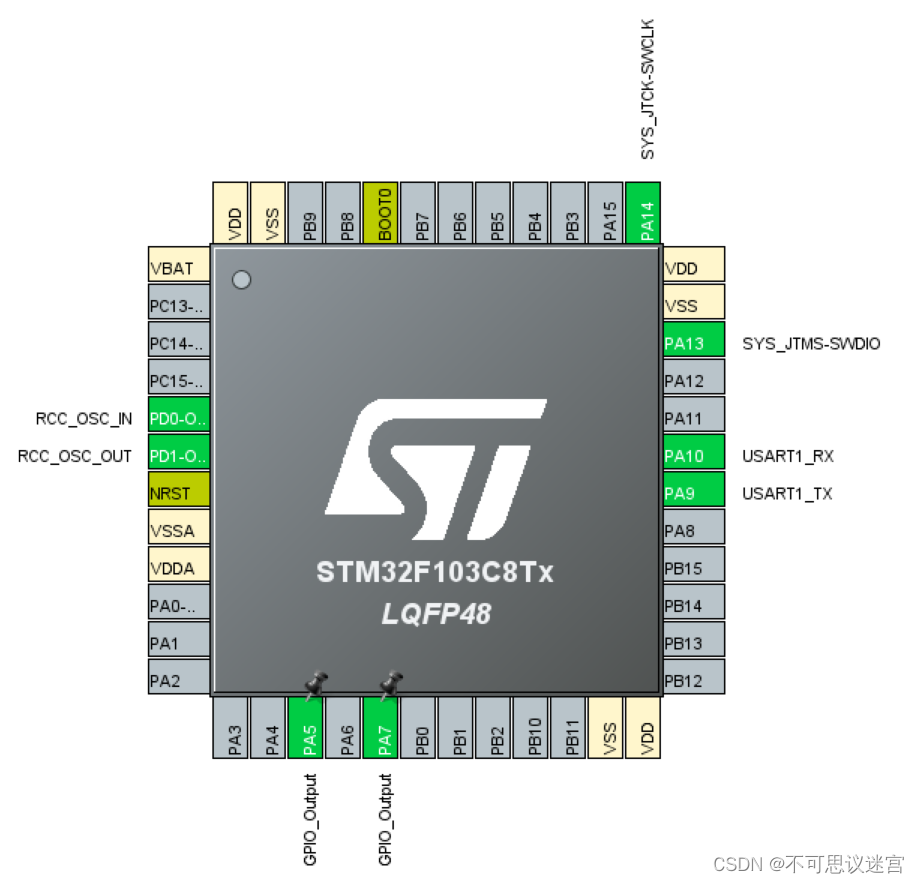
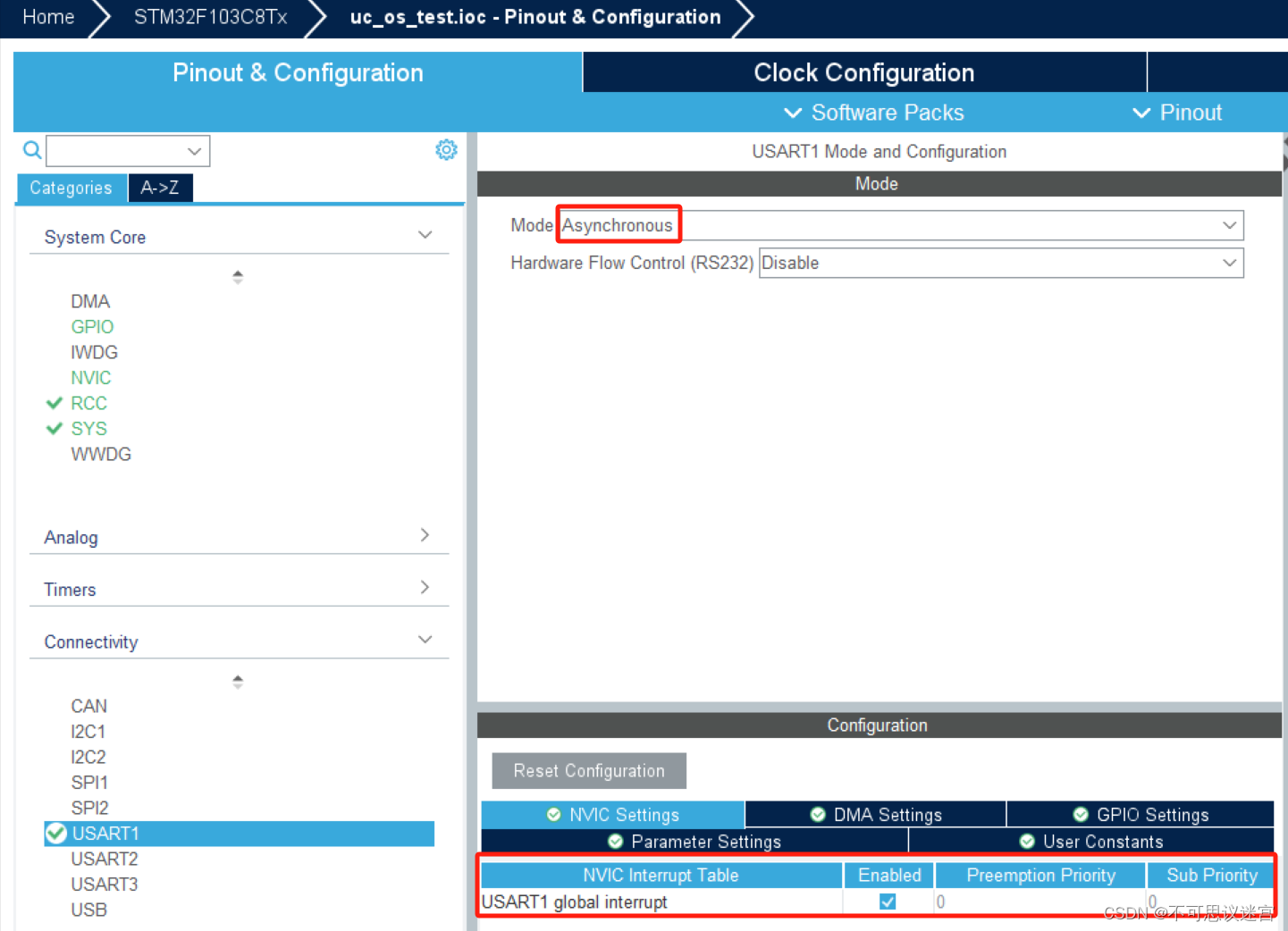
接着配置串口。
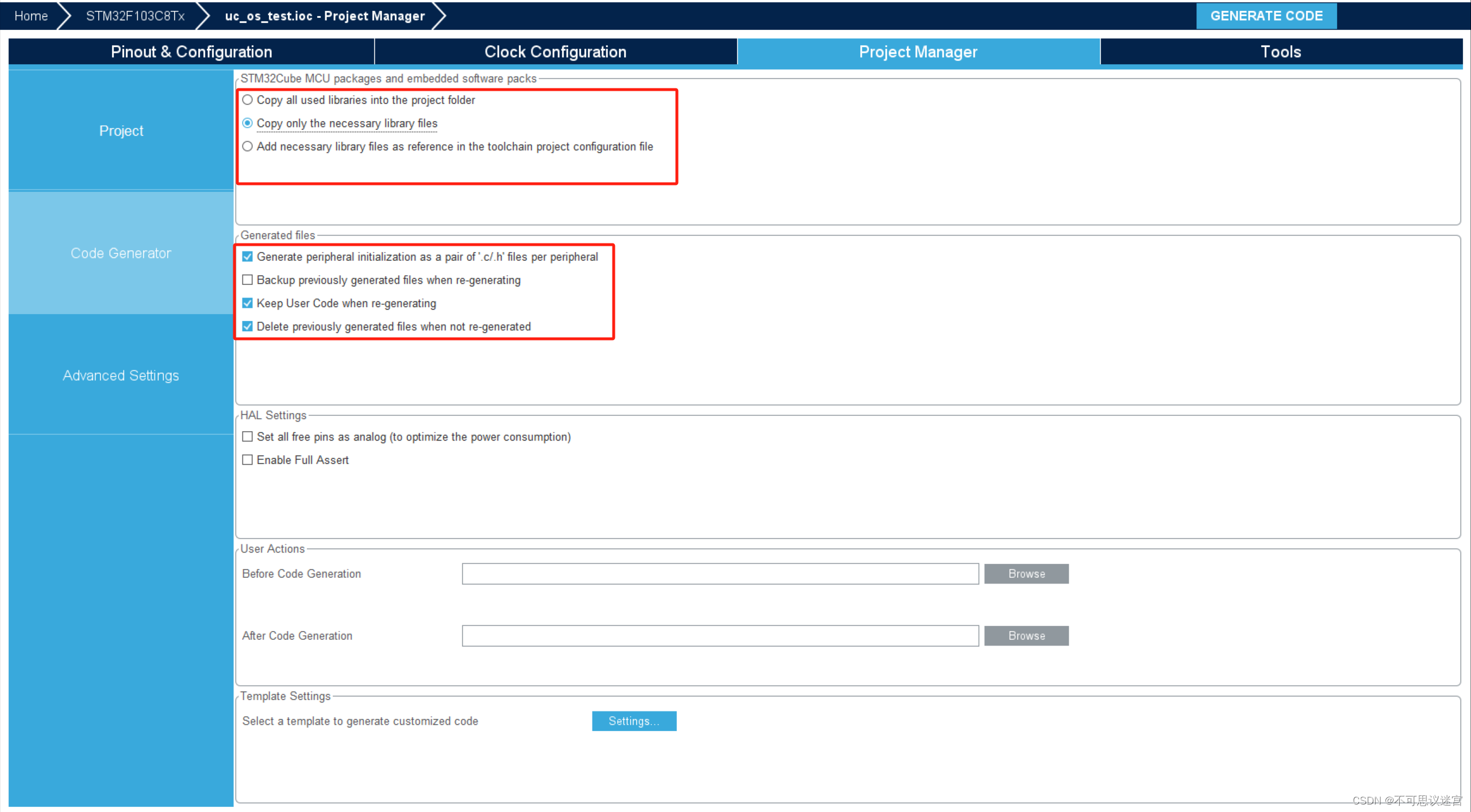
然后为工程命名,进行代码相关配置,完成代码生成。
二、获取uc-os源码
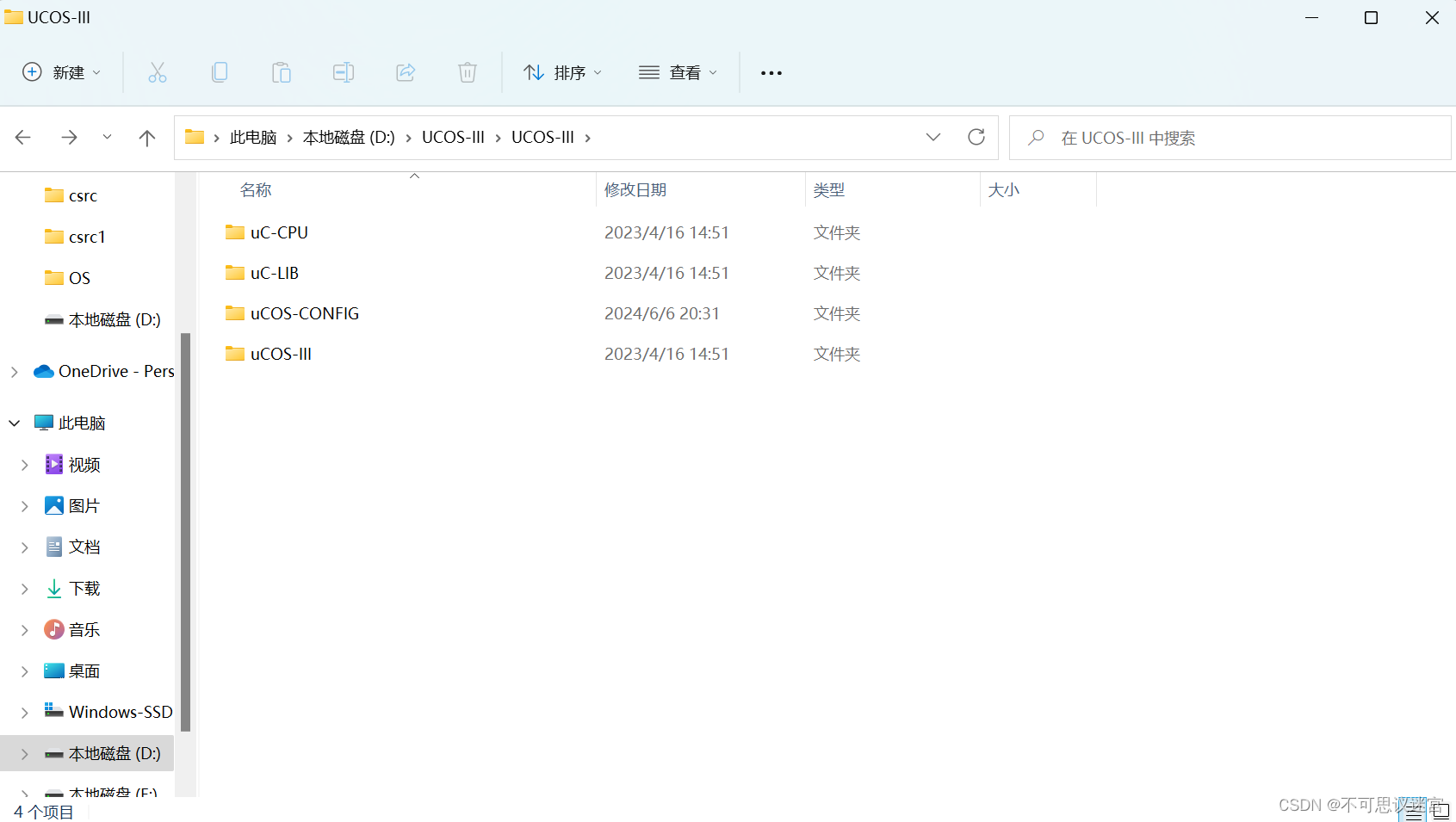
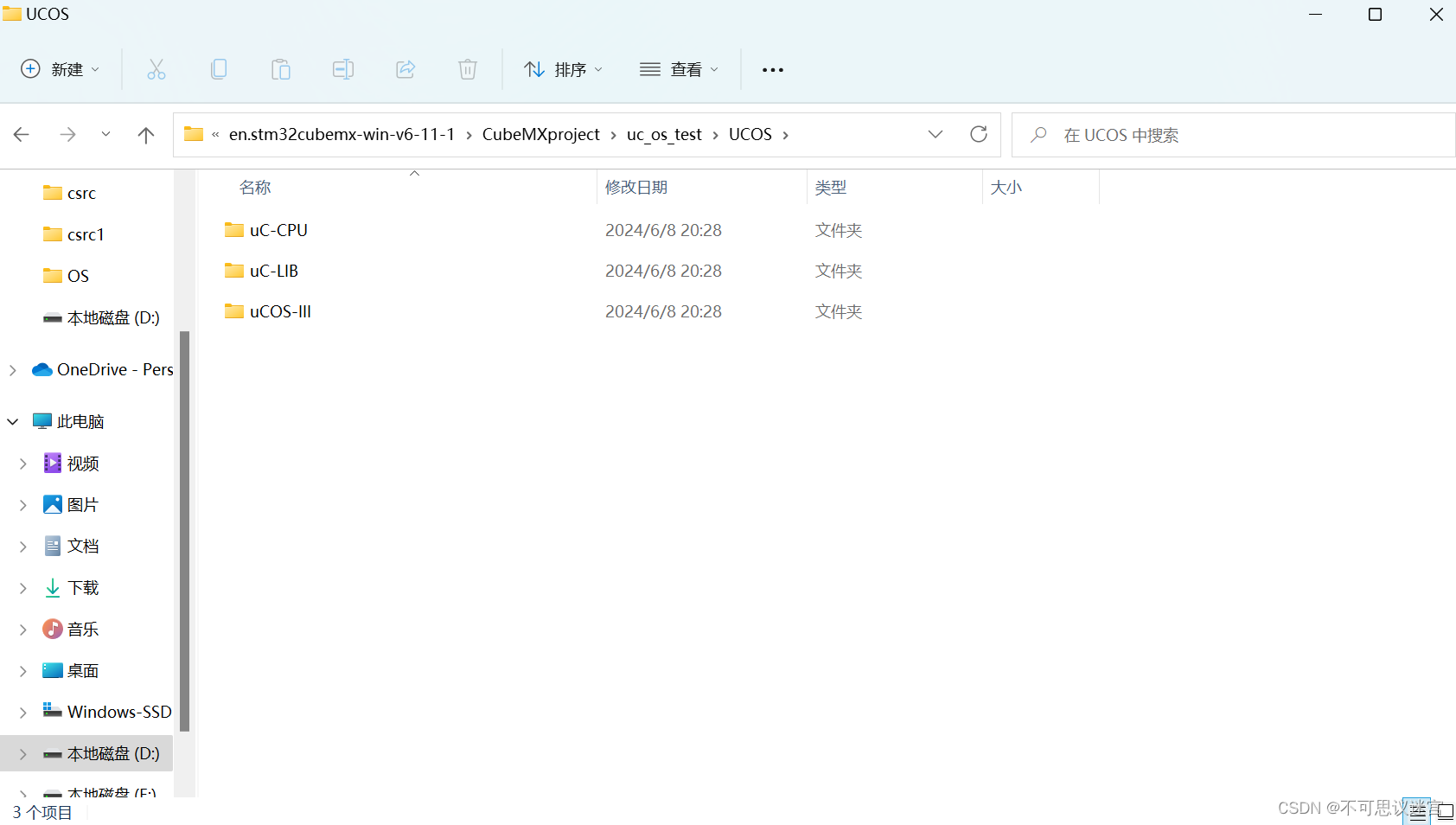
百度网盘链接:百度网盘 请输入提取码 提取码:3123 下载得到以下文件。
三、代码移植
1.在生成的工程文件目录下新建一个“UCOS”文件夹,并原码文件uc-CPU、uc-LIB、uCOS-III复到该文件夹。
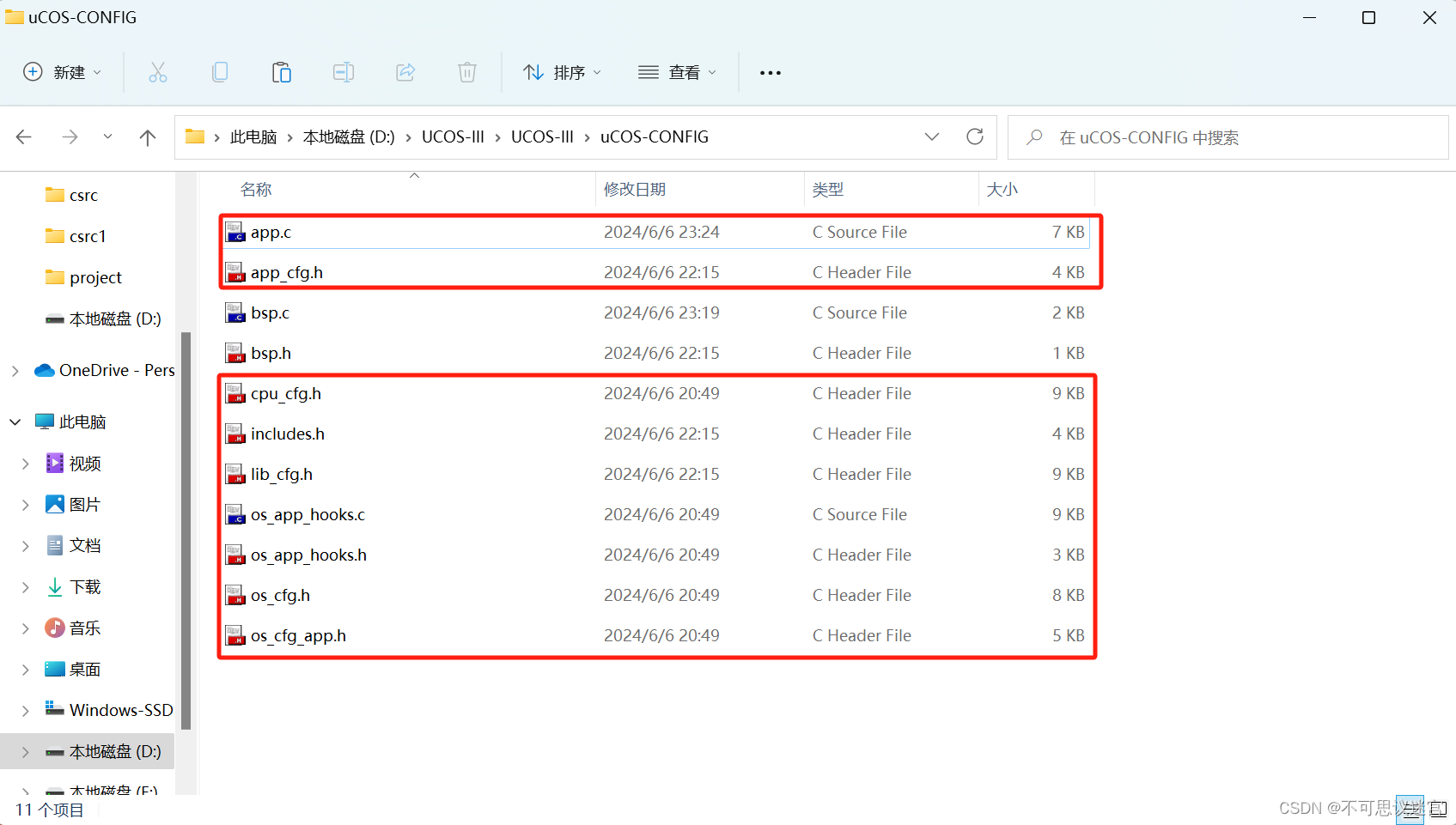
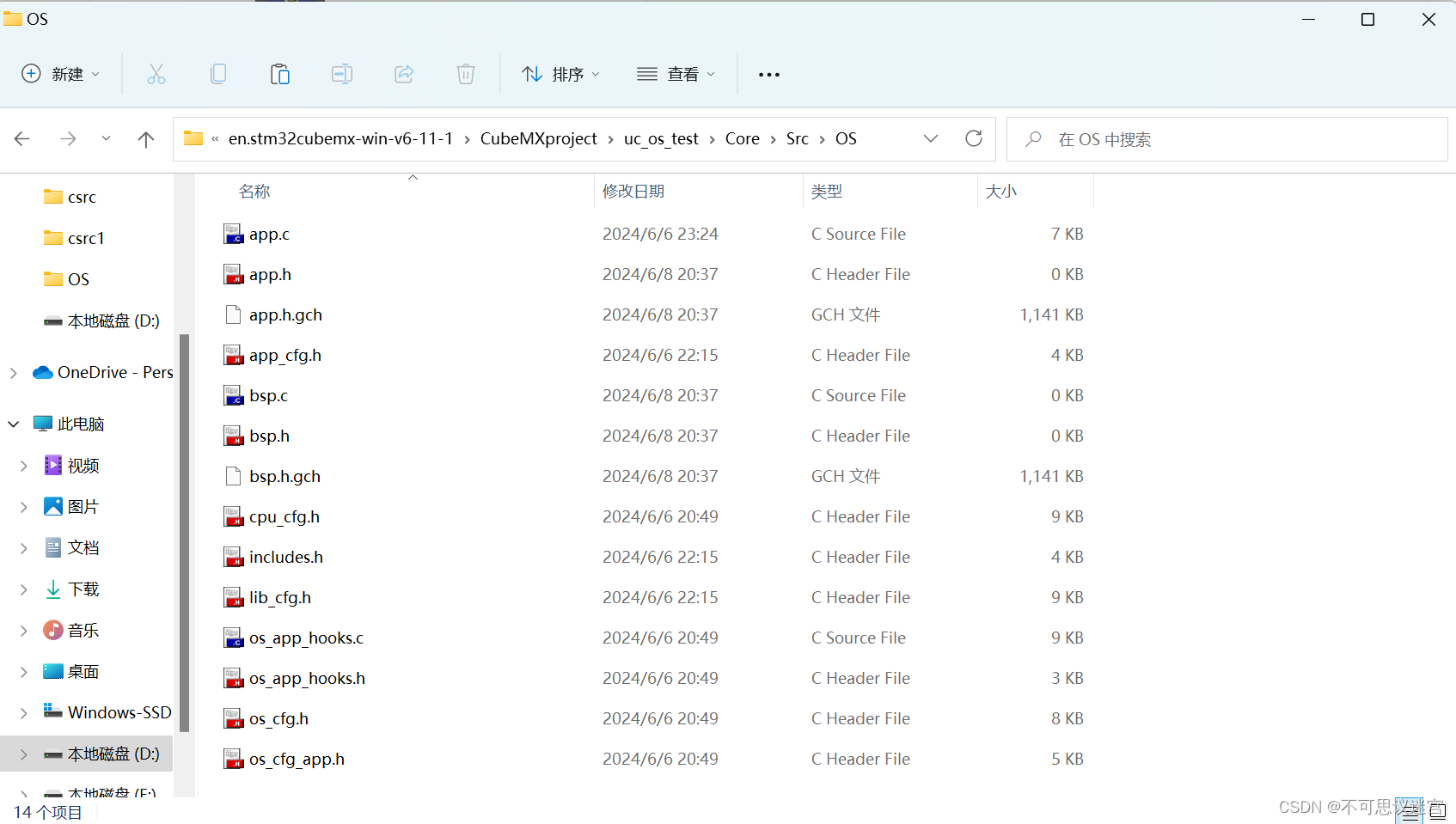
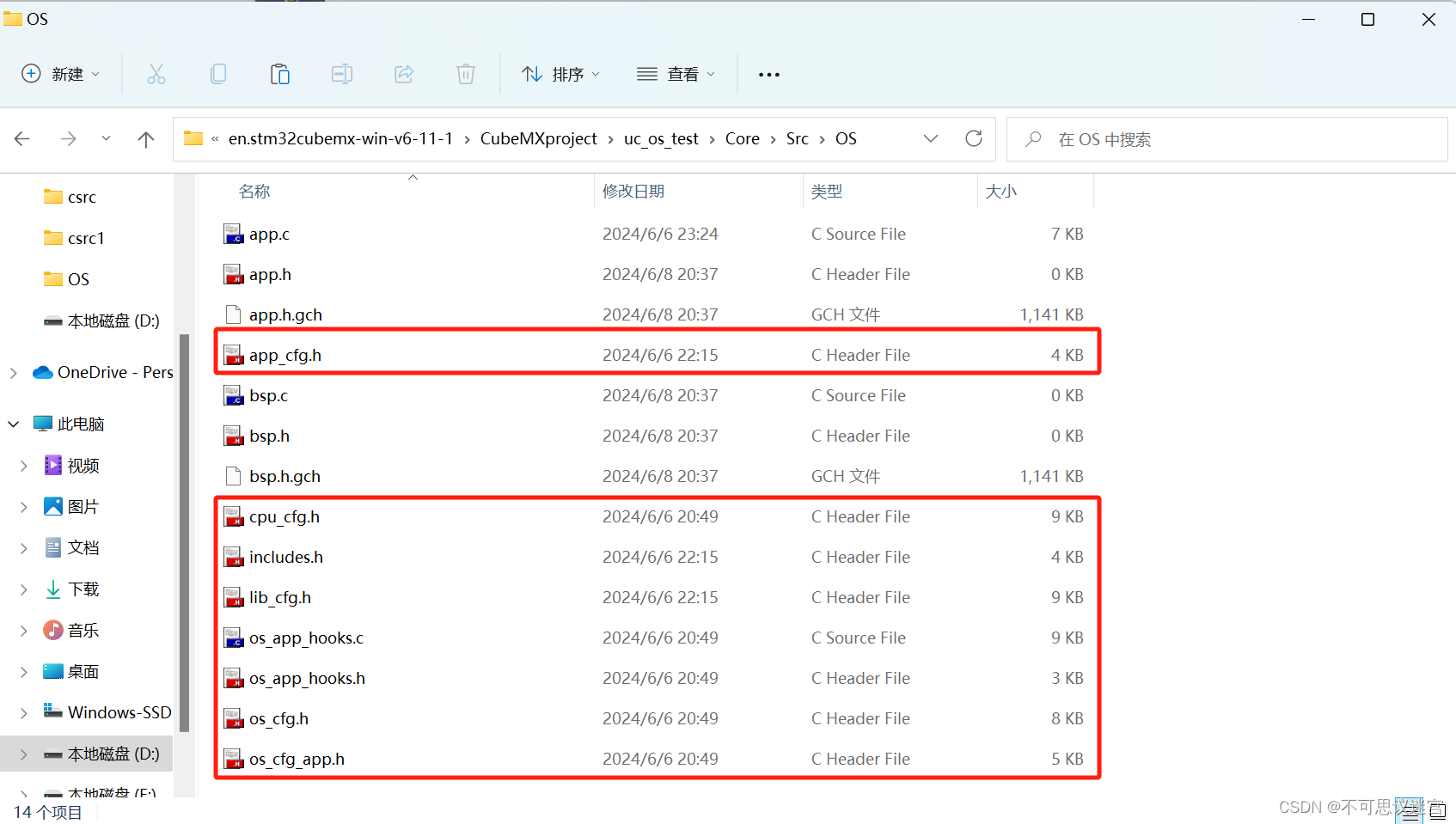
2.在工程文件目录中找到“Core\Src”,新建一个“OS”文件夹,并在源码文件中找到uCOS-CONFIG,将以下文件复制到OS文件夹,同时在该文件夹新建bsp.c、bsp.h、app.h三个空文件。
3.打开Kile,新建分组。
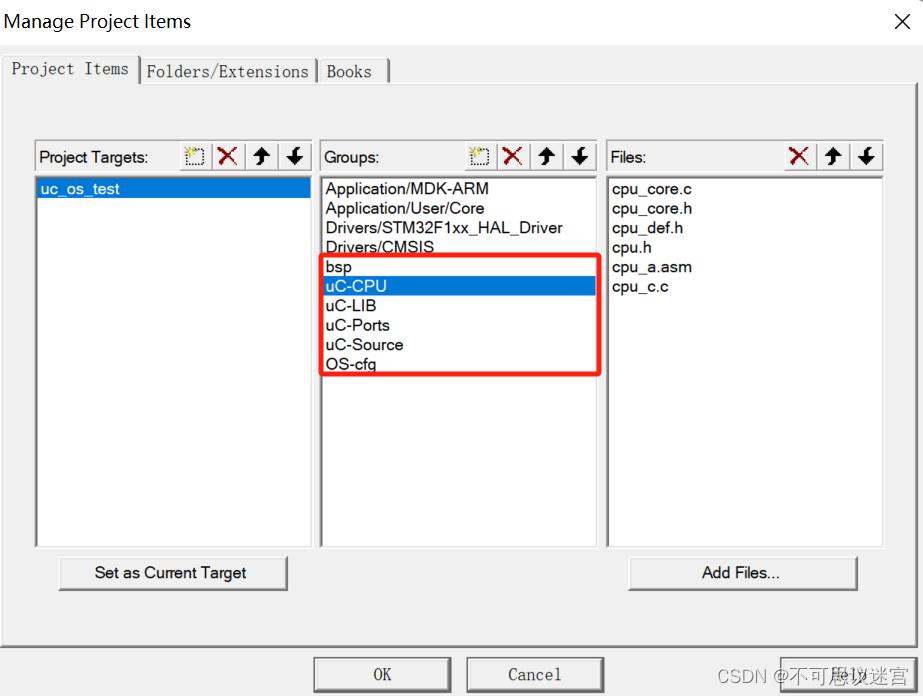
4.为新建的各分组录入文件。
将Src/OS中的bsp.c 和 bsp.h文件添加至 bsp 组中,将 app.c 添加进 Application/User/Core 组中。
将UCOSIII/uC-CPU中的cpu_core.c、cpu_core.h、cpu_def.h添加进uCOSIII_CPU组中,同时将UCOSIII/uC-CPU/ARM-Cortex-M3/RealView中的三个文件添加到该组。
将UCOSIII/uC-LIB中的9个文件添加到uCOSIII-LIB组中,同时将UCOSIII/uC-LIB/Ports/ARM-Cortex-M3/Realview中的lib_mem_a.asm添加到该组中。
将UCOSIII/UcosIII/Ports/ARM-Cortex-M3/Generic/RealView中的3个文件添加的uCOSIII_Ports组中。
将UCOSIII/UcosIII/Source中的20个文件添加到uCOSIII_Source组中。
将Core/Src/OS中的以下文件添加到OS_cfg组中。
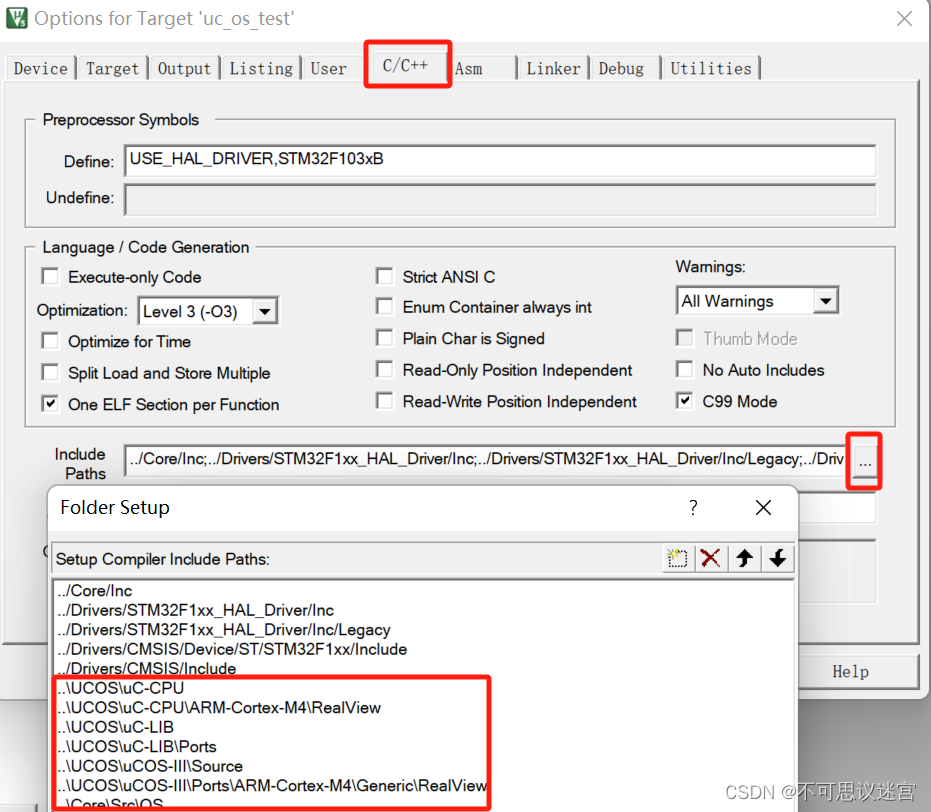
5.添加头文件路径。
四、代码修改
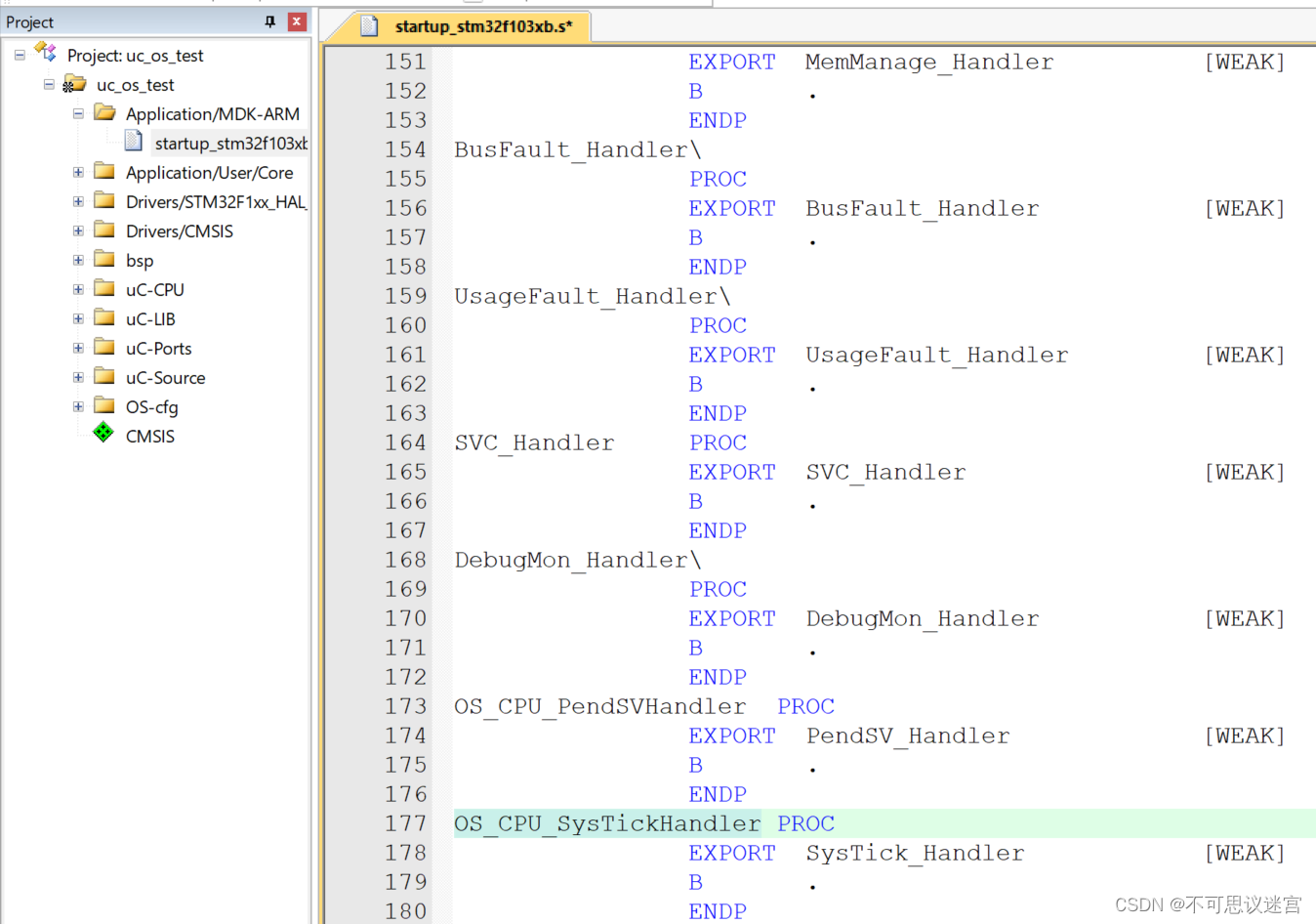
1.打开启动文件“startup_stm32f103xb.s”,找到第74、75行,改为如下代码。
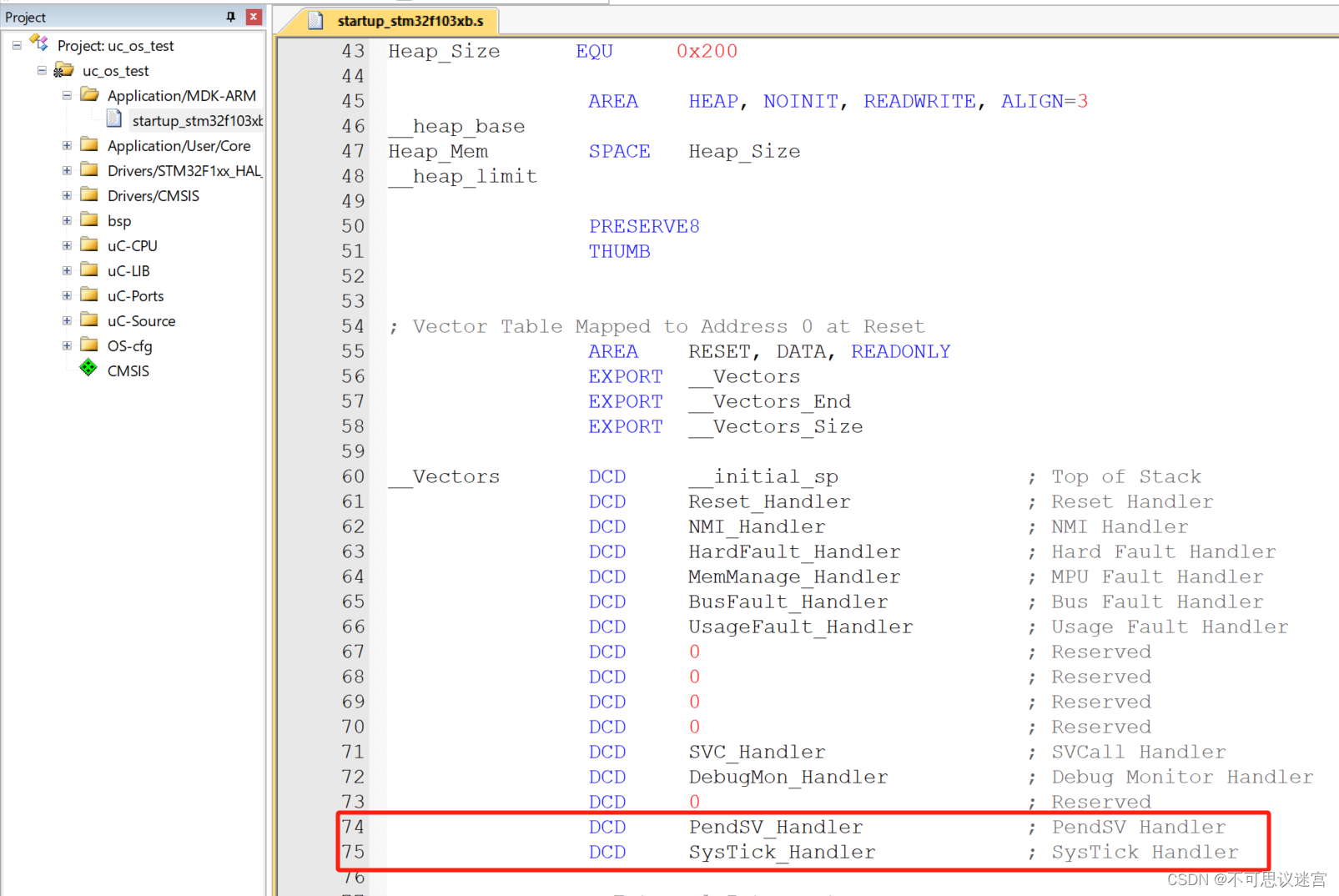
DCD OS_CPU_PendSVHandler;DCD OS_CPU_SysTickHandler;同样找到173、177行,将函数名改为上述函数名。
2.打开app_cfg.h文件,找到第42、85行,改为如下代码。
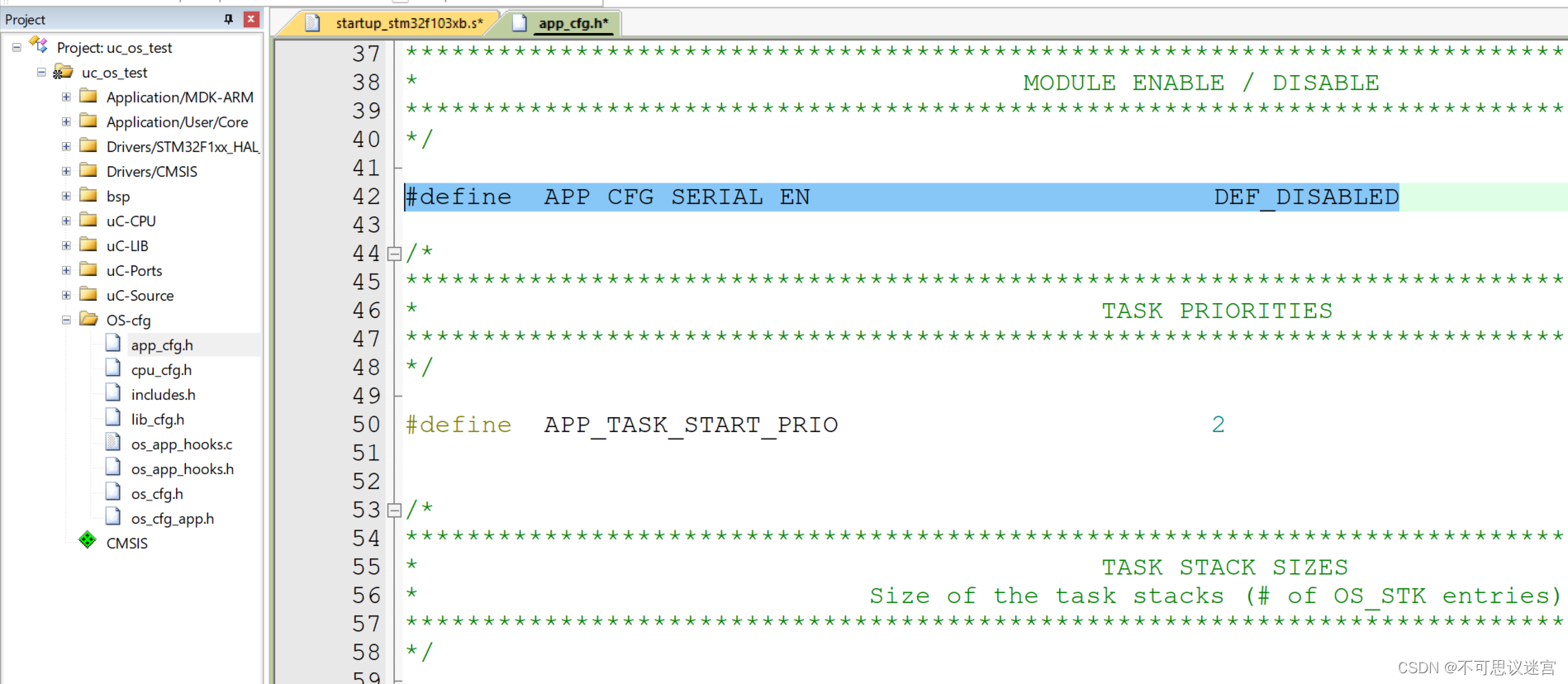
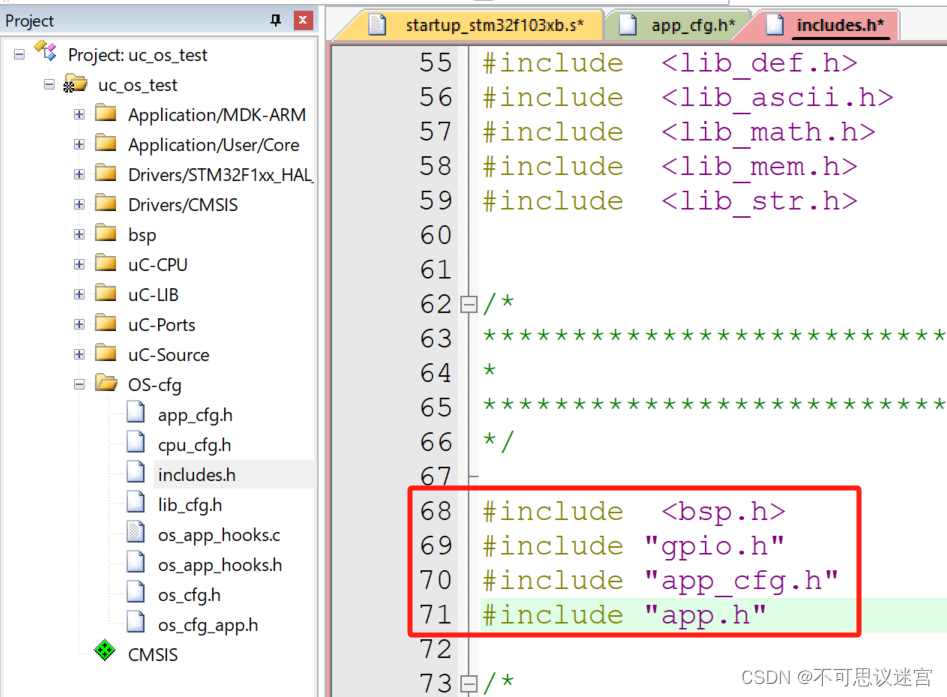
#define APP CFG SERIAL EN DEF_DISABLED#define APP_TRACE (void)3.打开includes.h文件,作如下修改。
4.bsp.c和bsp.h。
// bsp.c
#include "includes.h"#define DWT_CR *(CPU_REG32 *)0xE0001000
#define DWT_CYCCNT *(CPU_REG32 *)0xE0001004
#define DEM_CR *(CPU_REG32 *)0xE000EDFC
#define DBGMCU_CR *(CPU_REG32 *)0xE0042004#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)CPU_INT32U BSP_CPU_ClkFreq (void)
{return HAL_RCC_GetHCLKFreq();
}void BSP_Tick_Init(void)
{CPU_INT32U cpu_clk_freq;CPU_INT32U cnts;cpu_clk_freq = BSP_CPU_ClkFreq();#if(OS_VERSION>=3000u)cnts = cpu_clk_freq/(CPU_INT32U)OSCfg_TickRate_Hz;#elsecnts = cpu_clk_freq/(CPU_INT32U)OS_TICKS_PER_SEC;#endifOS_CPU_SysTickInit(cnts);
}void BSP_Init(void)
{BSP_Tick_Init();MX_GPIO_Init();
}#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
void CPU_TS_TmrInit (void)
{CPU_INT32U cpu_clk_freq_hz;DEM_CR |= (CPU_INT32U)DEM_CR_TRCENA; /* Enable Cortex-M3's DWT CYCCNT reg. */DWT_CYCCNT = (CPU_INT32U)0u;DWT_CR |= (CPU_INT32U)DWT_CR_CYCCNTENA;cpu_clk_freq_hz = BSP_CPU_ClkFreq();CPU_TS_TmrFreqSet(cpu_clk_freq_hz);
}
#endif#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
CPU_TS_TMR CPU_TS_TmrRd (void)
{return ((CPU_TS_TMR)DWT_CYCCNT);
}
#endif#if (CPU_CFG_TS_32_EN == DEF_ENABLED)
CPU_INT64U CPU_TS32_to_uSec (CPU_TS32 ts_cnts)
{CPU_INT64U ts_us;CPU_INT64U fclk_freq;fclk_freq = BSP_CPU_ClkFreq();ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);return (ts_us);
}
#endif#if (CPU_CFG_TS_64_EN == DEF_ENABLED)
CPU_INT64U CPU_TS64_to_uSec (CPU_TS64 ts_cnts)
{CPU_INT64U ts_us;CPU_INT64U fclk_freq;fclk_freq = BSP_CPU_ClkFreq();ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);return (ts_us);
}
#endif
// bsp.h
#ifndef __BSP_H__
#define __BSP_H__#include "stm32f1xx_hal.h"void BSP_Init(void);#endif5.在usart.c文件中添加以下代码完成printf的重定向以便使用printf函数。
//添加头文件#include "stdio.h"/* USER CODE BEGIN 1 */int fputc(int ch,FILE *f){HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xffff);return ch;}/* USER CODE END 1 */6.打开lib_cfg.h文件,加入宏定义。
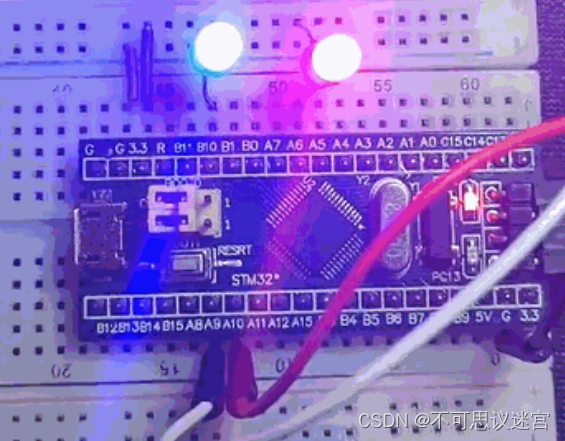
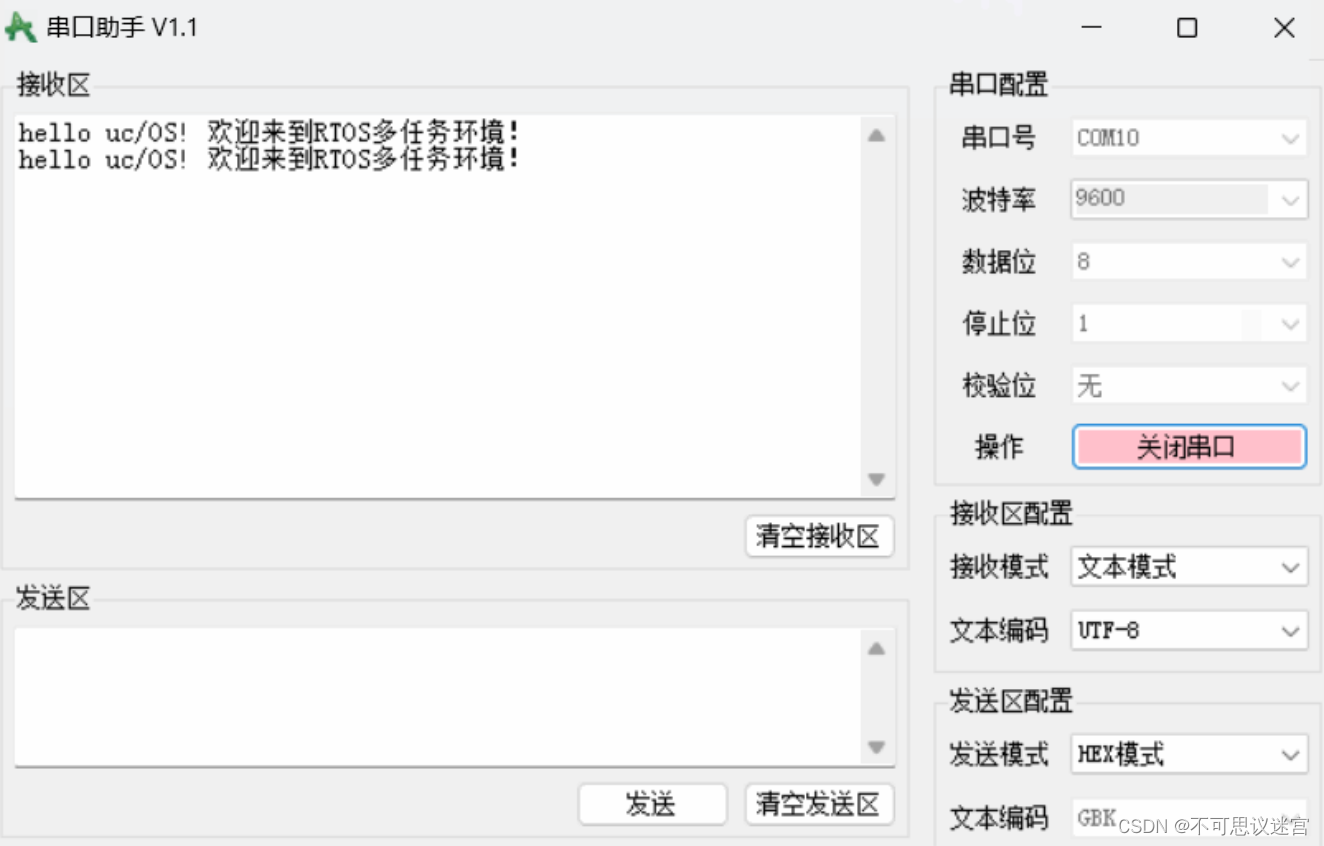
#define LIB_MEM_CFG_HEAP_SIZE 10u * 1024u7.打开main.c文件,为了实现目标任务:构建至少3个任务(task),其中两个task分别以1s和3s周期对LED等进行点亮-熄灭的控制;另外一个task以2s周期通过串口发送“hello uc/OS! 欢迎来到RTOS多任务环境!”。作如下修改。
#include "main.h"#include "usart.h"#include "gpio.h"#include <includes.h>/* 任务优先级 */#define START_TASK_PRIO 2#define LED0_TASK_PRIO 3#define LED1_TASK_PRIO 3#define MSG_TASK_PRIO 4/* 任务堆栈大小 */#define START_STK_SIZE 96#define LED0_STK_SIZE 64#define LED1_STK_SIZE 64#define MSG_STK_SIZE 64/*定义任务控制块*/static OS_TCB StartTaskTCB;static OS_TCB Led0TaskTCB;static OS_TCB Led1TaskTCB;static OS_TCB MsgTaskTCB;/*定义任务堆栈*/static CPU_STK START_TASK_STK[START_STK_SIZE];static CPU_STK LED0_TASK_STK[LED0_STK_SIZE];static CPU_STK LED1_TASK_STK[LED1_STK_SIZE];static CPU_STK MSG_TASK_STK[MSG_STK_SIZE];void SystemClock_Config(void);/*声明用户任务*/void start_task(void *p_arg);static void led_PA1(void *p_arg);static void send_msg(void *p_arg);static void led_PA5(void *p_arg);/*主函数*/int main(void){OS_ERR err;OSInit(&err);HAL_Init();SystemClock_Config();//MX_GPIO_Init(); 这个在BSP的初始化里也会初始化MX_USART1_UART_Init(); /* 创建任务 */OSTaskCreate((OS_TCB *)&StartTaskTCB, /* Create the start task */(CPU_CHAR *)"start task",(OS_TASK_PTR ) start_task,(void *) 0,(OS_PRIO ) START_TASK_PRIO,(CPU_STK *)&START_TASK_STK[0],(CPU_STK_SIZE) START_STK_SIZE/10,(CPU_STK_SIZE) START_STK_SIZE,(OS_MSG_QTY ) 0,(OS_TICK ) 0,(void *) 0,(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),(OS_ERR *)&err);/* 启动多任务系统,控制权交给uC/OS-III */OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */ }void start_task(void *p_arg){OS_ERR err;CPU_SR_ALLOC();p_arg = p_arg;/* YangJie add 2021.05.20*/BSP_Init(); /* Initialize BSP functions *///CPU_Init();//Mem_Init(); /* Initialize Memory Management Module */#if OS_CFG_STAT_TASK_EN > 0uOSStatTaskCPUUsageInit(&err); //统计任务 #endif#ifdef CPU_CFG_INT_DIS_MEAS_EN //如果使能了测量中断关闭时间CPU_IntDisMeasMaxCurReset(); #endif#if OS_CFG_SCHED_ROUND_ROBIN_EN //当使用时间片轮转的时候//使能时间片轮转调度功能,时间片长度为1个系统时钟节拍,既1*5=5msOSSchedRoundRobinCfg(DEF_ENABLED,1,&err); #endif OS_CRITICAL_ENTER(); //进入临界区/* 创建LED0任务 */OSTaskCreate((OS_TCB * )&Led0TaskTCB, (CPU_CHAR * )"led_PA1", (OS_TASK_PTR )led_PA1, (void * )0, (OS_PRIO )LED0_TASK_PRIO, (CPU_STK * )&LED0_TASK_STK[0], (CPU_STK_SIZE)LED0_STK_SIZE/10, (CPU_STK_SIZE)LED0_STK_SIZE, (OS_MSG_QTY )0, (OS_TICK )0, (void * )0, (OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,(OS_ERR * )&err); /* 创建LED1任务 */OSTaskCreate((OS_TCB * )&Led1TaskTCB, (CPU_CHAR * )"led_PA5", (OS_TASK_PTR )led_PA5, (void * )0, (OS_PRIO )LED1_TASK_PRIO, (CPU_STK * )&LED1_TASK_STK[0], (CPU_STK_SIZE)LED1_STK_SIZE/10, (CPU_STK_SIZE)LED1_STK_SIZE, (OS_MSG_QTY )0, (OS_TICK )0, (void * )0, (OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,(OS_ERR * )&err); /* 创建MSG任务 */OSTaskCreate((OS_TCB * )&MsgTaskTCB, (CPU_CHAR * )"send_msg", (OS_TASK_PTR )send_msg, (void * )0, (OS_PRIO )MSG_TASK_PRIO, (CPU_STK * )&MSG_TASK_STK[0], (CPU_STK_SIZE)MSG_STK_SIZE/10, (CPU_STK_SIZE)MSG_STK_SIZE, (OS_MSG_QTY )0, (OS_TICK )0, (void * )0, (OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR, (OS_ERR * )&err);OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //挂起开始任务 OS_CRITICAL_EXIT(); //进入临界区}static void led_PA1 (void *p_arg){OS_ERR err;(void)p_arg;BSP_Init(); /* Initialize BSP functions */CPU_Init();Mem_Init(); /* Initialize Memory Management Module */#if OS_CFG_STAT_TASK_EN > 0uOSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */#endifCPU_IntDisMeasMaxCurReset();/* Create Application Objects */while (DEF_TRUE){HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_RESET);OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_SET);OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */}static void led_PA5 (void *p_arg){OS_ERR err;(void)p_arg;BSP_Init(); /* Initialize BSP functions */CPU_Init();Mem_Init(); /* Initialize Memory Management Module */#if OS_CFG_STAT_TASK_EN > 0uOSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */#endifCPU_IntDisMeasMaxCurReset();while (DEF_TRUE){HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_SET);OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */}static void send_msg (void *p_arg){OS_ERR err;(void)p_arg;BSP_Init(); /* Initialize BSP functions */CPU_Init();Mem_Init(); /* Initialize Memory Management Module */#if OS_CFG_STAT_TASK_EN > 0uOSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */#endifCPU_IntDisMeasMaxCurReset();/* Create Application Objects */while (DEF_TRUE){printf("hello uc/OS! 欢迎来到RTOS多任务环境! \r\n");OSTimeDlyHMSM(0, 0, 2, 0,OS_OPT_TIME_HMSM_STRICT,&err);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */}void SystemClock_Config(void){RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI_DIV2;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK){Error_Handler();}}void Error_Handler(void){__disable_irq();while (1){}}#ifdef USE_FULL_ASSERTvoid assert_failed(uint8_t *file, uint32_t line){}#endif 以上便是需要修改的所有代码,爔现在可以对实验现象进行观察。
五、总结
本次实验完成了对us_os的操作练习,但对us_os的理解始终不深,更多的是学着别人的做,还需要多多练习。
六、参考资料
STM32F103C8T6移植uC/OS-III基于HAL库超完整详细过程
STM32F103C8移植uCOSIII(HAL库)












