
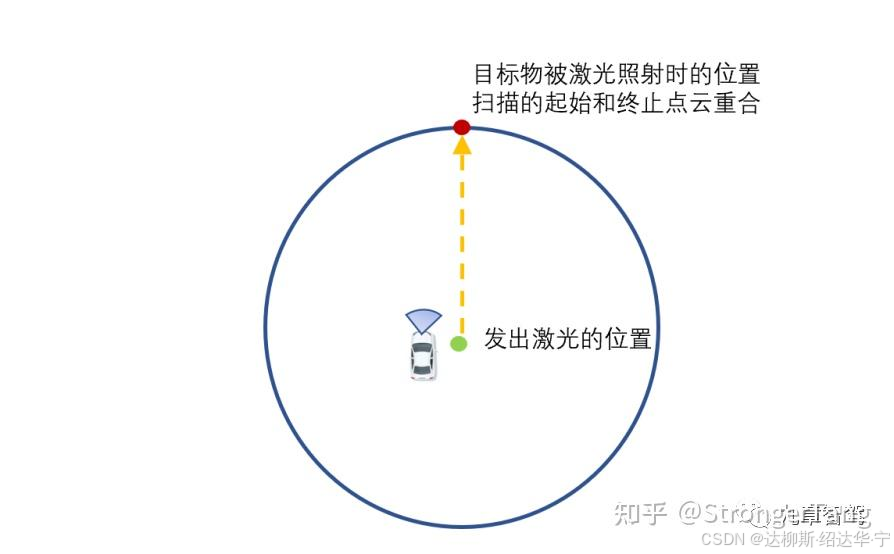
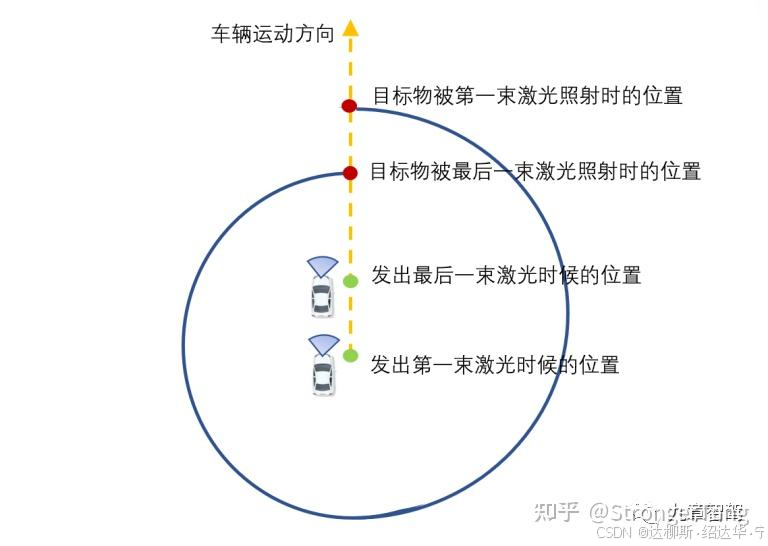
当激光雷达(LiDAR)在运动中采集点云时,每个点的时间戳不同,而车辆在移动,导致点云在不同时间点的坐标与实际情况不符,这种现象称为运动畸变(Motion Distortion)。为了得到无畸变的点云,需要进行运动畸变补偿。
LIO-SAM(IMU + LiDAR):https://github.com/TixiaoShan/LIO-SAM
https://ieeexplore.ieee.org/document/9341176
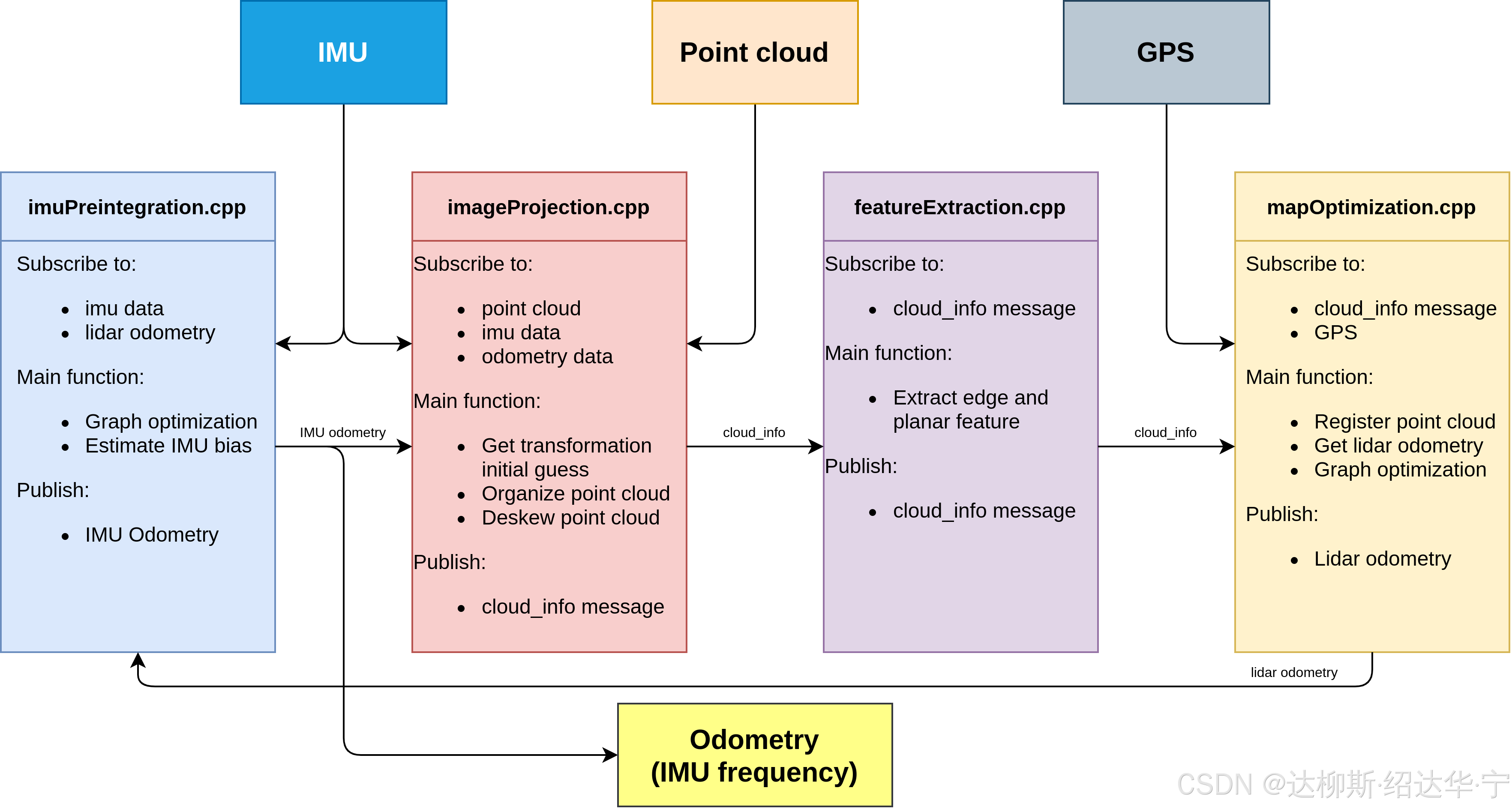
LIO-SAM 是一个基于因子图优化的激光雷达-惯性导航里程计(LiDAR-Inertial Odometry, LIO)的开源 SLAM 框架。它结合了激光雷达点云与IMU 数据,通过优化算法(GTSAM)进行高精度定位和建图,特别适用于动态环境和运动畸变补偿。
LIO-SAM 主要用于:
-
点云去畸变补偿(消除 LiDAR 在运动中的扭曲)
-
实时激光 SLAM(局部里程计 + 全局地图优化)
-
自动驾驶、无人机、机器人导航等场景
研究背景
LOAM是目前为止激光里程计(LO)领域最经典最广泛使用的方法。但是它存在一个问题,就是它直接存储全局体素地图而不是局部地图,从而很难执行回环检测以修正漂移,或者组合GPS(提供绝对位置)等测量进行位姿修正。并且体素地图的使用效率会随时间降低。为了克服该问题,作者只独立地存储每个关键帧的特征,而不是在位姿估计完成后就将特征加入到全局地图中。
另一方面,IMU和LiDAR的联合位姿估计已经被广泛研究,大致分为两类。第一类是松耦合的方法,例如LOAM和LeGO-LOAM中使用IMU去除LiDAR点云的运动畸变,以及[8]-[12]使用EKF整合LiDAR和IMU的测量。第二类是紧耦合的方法,例如R-LINS[15],使用误差状态卡尔曼滤波器迭代地修正机器人的位姿估计,再比如LIOM [16]联合优化LiDAR和IMU测量。但是LIOM一次性处理所有测量,因此不能实时运行。而本文也属于紧耦合的激光-惯性里程计方法,只是采用了因子图优化而不是滤波的方法。
LOAM 主要基于 激光点云特征匹配 来估计位姿,每一帧都会根据上一帧的位姿进行增量更新。但这种方法会导致:
-
短期误差累积:每一帧匹配的误差会逐步积累,导致位姿逐步偏移。
-
长时间运行后误差显著:如果机器人或无人车长时间运行,没有全局优化,就可能出现位置漂移,使得建图产生错位。
回环检测:当机器人/无人车回到某个 曾经到达的地方,通过匹配当前点云和历史点云,可以发现 当前估计的位姿和真实位姿的偏差。
1. LIO-SAM 运动畸变补偿原理
LiDAR 由于逐点扫描,每个点的采集时间不同,因此在车辆运动时,同一帧点云可能包含不同时间的位置信息,导致点云扭曲(Motion Distortion)。
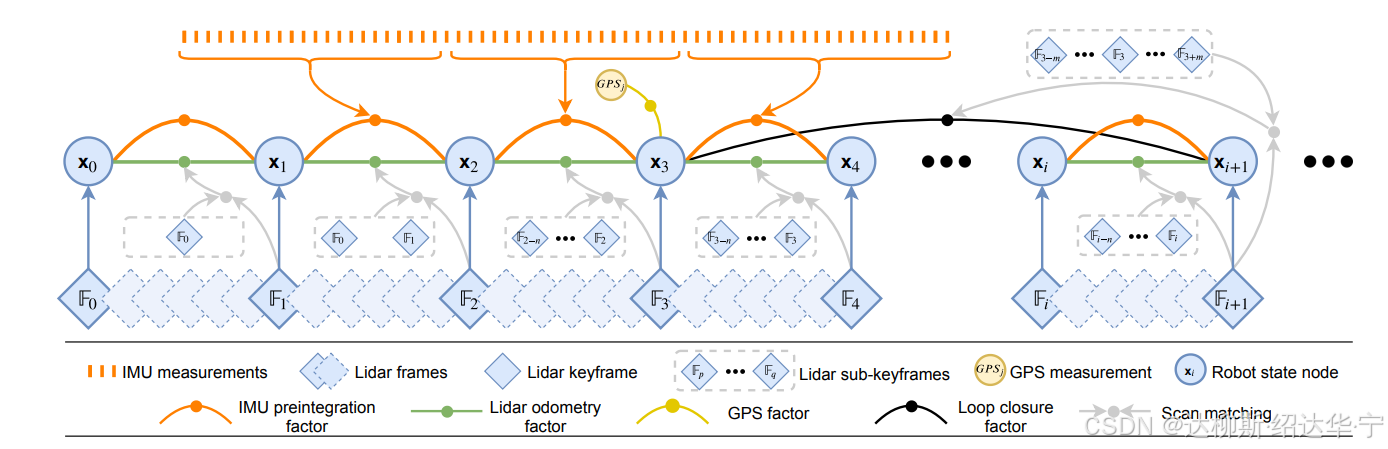
图2展示了LIO-SAM的因子图。图中主要包含四种因子。第一种是IMU预积分因子(橙色),由两个相邻关键帧之间的IMU测量积分得到。第二种是激光里程计因子(绿色),由每个关键帧和之前n个关键帧之间的帧图匹配结果得到。第三种是GPS因子(黄色),由每个关键帧的GPS测量得到。第四种是回环因子(黑色),由每个关键帧和候选回环关键帧的时序相邻的2m+1个关键帧之间的帧图匹配得到。
因子图是什么?
因子图是一种概率图模型,它用于优化机器人在不同时间步的位姿(Position & Orientation),使其符合传感器观测数据的约束。在LIO-SAM中,因子图的优化由 iSAM2(增量平滑和映射)算法完成。
因子图的本质:
变量(节点):表示待优化的机器人关键帧位姿(位置、方向)。
约束(因子):连接不同变量的观测数据,提供优化条件。
IMU预积分因子(橙色)
数据来源:IMU传感器(惯性测量单元)。
作用:利用IMU数据,估计两个相邻关键帧之间的位移和旋转。
原理:
由于IMU可以高频率提供加速度和角速度信息,因此可以通过 数值积分 来推算位姿变化。
但单独使用IMU会导致 漂移(drift),因此需要与其他传感器(如Lidar)进行融合校正。
激光里程计因子(绿色)
数据来源:激光雷达点云的匹配结果(帧间匹配)。
作用:通过点云匹配计算关键帧之间的位姿变换,提高里程计的精度。
原理:
LIO-SAM在每个关键帧与前 n 个关键帧之间进行点云匹配,计算相对位姿变化。
这个因子提供了 短时间尺度的几何约束,用于修正IMU的漂移。
GPS因子(黄色)
数据来源:GPS 传感器。
作用:提供全局定位信息,防止长期漂移。
原理:
GPS测量的是绝对坐标(经纬度或UTM坐标),可以为因子图提供全球位置信息。
由于GPS可能存在噪声(如城市环境中的多路径效应),LIO-SAM并不直接采用GPS的数值,而是将其作为软约束,用于优化位姿。
回环因子(黑色)
数据来源:基于激光雷达点云的回环检测(Loop Closure)。
作用:当机器人经过曾经到达过的地方,检测并校正累积漂移,提高长期建图精度。
原理:
通过 扫描匹配(Scan Matching),检测当前关键帧是否与历史关键帧匹配。
如果匹配成功,则添加一个回环因子,提供全局几何约束,用于修正误差。
LIO-SAM使用了 2m+1 个关键帧 进行匹配,以确保匹配稳定性。
因子图优化(iSAM2)
LIO-SAM使用 iSAM2(增量平滑和映射)算法进行因子图优化。
iSAM2的特点:
通过增量更新的方式,避免每次重新计算整个因子图,提高计算效率。
只在新增关键帧时进行局部优化,保证了实时性。
结合 IMU、Lidar、GPS、回环检测 的多传感器信息,提高位姿估计的精度和鲁棒性。
2. 核心思路及步骤
LIO-SAM 通过IMU 预积分(IMU Pre-integration),将 IMU 计算出的运动轨迹与 LiDAR 点云的时间戳对齐,从而补偿 LiDAR 运动导致的畸变。核心思路如下:
步骤 1:获取 LiDAR 和 IMU 数据
-
LiDAR 点云帧(Scan):包含多个点,每个点有自己的时间戳。
-
IMU 数据(惯性测量):
-
加速度计(Acceleration)
-
陀螺仪(Gyroscope)
-
角速度 & 线速度
-
-
时间同步:确保 IMU 与 LiDAR 的时间戳对齐(通常用硬件同步,或软件插值处理)。
步骤 2:IMU 预积分(Pre-integration)
IMU 在两个时刻之间的测量值(加速度 & 角速度)可以计算增量运动轨迹,即:
-
旋转增量
-
位置增量
-
速度增量
LIO-SAM 通过 IMU 预积分,在 LiDAR 点云的采集时间范围内,估计出每个时间点的位姿 ,用于运动畸变补偿。
步骤 3:将点云变换到统一坐标系
-
设
是 LiDAR 采集的某个点
-
设
是该点采集时刻的世界坐标系位姿
-
目标是将所有点转换到相同时间(通常是当前帧起始时间
):

其中:
-
是补偿后的世界坐标
-
是 LiDAR 采集时的局部坐标
-
是扫描开始时刻的位姿
-
-
步骤 4:因子图优化(Factor Graph Optimization)
LIO-SAM 采用 GTSAM(Factor Graph) 进行位姿优化:
-
通过 IMU 计算短时间位姿变换(高频)
-
通过 LiDAR 进行回环检测(低频)
-
结合 GPS,优化全局地图












