
目录
- 项目介绍
- 环境搭建
- Lesson 1: Bresenham’s Line Drawing Algorithm(画线算法)
- Lesson 2: Triangle rasterization 三角形光栅化
- Scanline rendering 线性扫描
- Modern rasterization approach 现代栅格化方法
- back-face culling 背面剔除
- Lesson 3: Hidden faces removal (z buffer)
- Lesson 4: Perspective projection
GitHub主页:https://github.com/sdpyy
项目仓库:https://github.com/sdpyy1/CppLearn/tree/main/tinyrenderer
项目介绍
Tiny Renderer or how OpenGL works: software rendering in 500 lines of code
项目地址:https://github.com/ssloy/tinyrenderer
In this series of articles, I want to show how OpenGL works by writing its clone (a much simplified one). Surprisingly enough, I often meet people who cannot overcome the initial hurdle of learning OpenGL / DirectX. Thus, I have prepared a short series of lectures, after which my students show quite good renderers.
So, the task is formulated as follows: using no third-party libraries (especially graphic ones), get something like this picture:
所以学习最终目标是不使用第三方代码,得到下面这种图,建议学完games101后来复习,不过过程很详细,作为入门也是不错的

环境搭建
虽然项目旨在不使用第三方库,但提供了图片读取、保存、设置像素点颜色的代码
tagimage.h
#pragma once
#include <cstdint>
#include <fstream>
#include <vector>#pragma pack(push,1)
struct TGAHeader {std::uint8_t idlength{};std::uint8_t colormaptype{};std::uint8_t datatypecode{};std::uint16_t colormaporigin{};std::uint16_t colormaplength{};std::uint8_t colormapdepth{};std::uint16_t x_origin{};std::uint16_t y_origin{};std::uint16_t width{};std::uint16_t height{};std::uint8_t bitsperpixel{};std::uint8_t imagedescriptor{};
};
#pragma pack(pop)struct TGAColor {std::uint8_t bgra[4] = {0,0,0,0};std::uint8_t bytespp = {0};TGAColor() = default;TGAColor(const std::uint8_t R, const std::uint8_t G, const std::uint8_t B, const std::uint8_t A=255) : bgra{B,G,R,A}, bytespp(4) { }TGAColor(const std::uint8_t *p, const std::uint8_t bpp) : bytespp(bpp) {for (int i=bpp; i--; bgra[i] = p[i]);}std::uint8_t& operator[](const int i) { return bgra[i]; }
};struct TGAImage {enum Format { GRAYSCALE=1, RGB=3, RGBA=4 };TGAImage() = default;TGAImage(const int w, const int h, const int bpp);bool read_tga_file(const std::string filename);bool write_tga_file(const std::string filename, const bool vflip=true, const bool rle=true) const;void flip_horizontally();void flip_vertically();TGAColor get(const int x, const int y) const;void set(const int x, const int y, const TGAColor &c);int width() const;int height() const;
private:bool load_rle_data(std::ifstream &in);bool unload_rle_data(std::ofstream &out) const;int w = 0;int h = 0;int bpp = 0;std::vector<std::uint8_t> data = {};
};
tgaimage.cpp
#include <iostream>
#include <cstring>
#include "tgaimage.h"TGAImage::TGAImage(const int w, const int h, const int bpp) : w(w), h(h), bpp(bpp), data(w*h*bpp, 0) {}bool TGAImage::read_tga_file(const std::string filename) {std::ifstream in;in.open (filename, std::ios::binary);if (!in.is_open()) {std::cerr << "can't open file " << filename << "\n";in.close();return false;}TGAHeader header;in.read(reinterpret_cast<char *>(&header), sizeof(header));if (!in.good()) {in.close();std::cerr << "an error occured while reading the header\n";return false;}w = header.width;h = header.height;bpp = header.bitsperpixel>>3;if (w<=0 || h<=0 || (bpp!=GRAYSCALE && bpp!=RGB && bpp!=RGBA)) {in.close();std::cerr << "bad bpp (or width/height) value\n";return false;}size_t nbytes = bpp*w*h;data = std::vector<std::uint8_t>(nbytes, 0);if (3==header.datatypecode || 2==header.datatypecode) {in.read(reinterpret_cast<char *>(data.data()), nbytes);if (!in.good()) {in.close();std::cerr << "an error occured while reading the data\n";return false;}} else if (10==header.datatypecode||11==header.datatypecode) {if (!load_rle_data(in)) {in.close();std::cerr << "an error occured while reading the data\n";return false;}} else {in.close();std::cerr << "unknown file format " << (int)header.datatypecode << "\n";return false;}if (!(header.imagedescriptor & 0x20))flip_vertically();if (header.imagedescriptor & 0x10)flip_horizontally();std::cerr << w << "x" << h << "/" << bpp*8 << "\n";in.close();return true;
}bool TGAImage::load_rle_data(std::ifstream &in) {size_t pixelcount = w*h;size_t currentpixel = 0;size_t currentbyte = 0;TGAColor colorbuffer;do {std::uint8_t chunkheader = 0;chunkheader = in.get();if (!in.good()) {std::cerr << "an error occured while reading the data\n";return false;}if (chunkheader<128) {chunkheader++;for (int i=0; i<chunkheader; i++) {in.read(reinterpret_cast<char *>(colorbuffer.bgra), bpp);if (!in.good()) {std::cerr << "an error occured while reading the header\n";return false;}for (int t=0; t<bpp; t++)data[currentbyte++] = colorbuffer.bgra[t];currentpixel++;if (currentpixel>pixelcount) {std::cerr << "Too many pixels read\n";return false;}}} else {chunkheader -= 127;in.read(reinterpret_cast<char *>(colorbuffer.bgra), bpp);if (!in.good()) {std::cerr << "an error occured while reading the header\n";return false;}for (int i=0; i<chunkheader; i++) {for (int t=0; t<bpp; t++)data[currentbyte++] = colorbuffer.bgra[t];currentpixel++;if (currentpixel>pixelcount) {std::cerr << "Too many pixels read\n";return false;}}}} while (currentpixel < pixelcount);return true;
}bool TGAImage::write_tga_file(const std::string filename, const bool vflip, const bool rle) const {constexpr std::uint8_t developer_area_ref[4] = {0, 0, 0, 0};constexpr std::uint8_t extension_area_ref[4] = {0, 0, 0, 0};constexpr std::uint8_t footer[18] = {'T','R','U','E','V','I','S','I','O','N','-','X','F','I','L','E','.','\0'};std::ofstream out;out.open (filename, std::ios::binary);if (!out.is_open()) {std::cerr << "can't open file " << filename << "\n";out.close();return false;}TGAHeader header;header.bitsperpixel = bpp<<3;header.width = w;header.height = h;header.datatypecode = (bpp==GRAYSCALE?(rle?11:3):(rle?10:2));header.imagedescriptor = vflip ? 0x00 : 0x20; // top-left or bottom-left originout.write(reinterpret_cast<const char *>(&header), sizeof(header));if (!out.good()) {out.close();std::cerr << "can't dump the tga file\n";return false;}if (!rle) {out.write(reinterpret_cast<const char *>(data.data()), w*h*bpp);if (!out.good()) {std::cerr << "can't unload raw data\n";out.close();return false;}} else if (!unload_rle_data(out)) {out.close();std::cerr << "can't unload rle data\n";return false;}out.write(reinterpret_cast<const char *>(developer_area_ref), sizeof(developer_area_ref));if (!out.good()) {std::cerr << "can't dump the tga file\n";out.close();return false;}out.write(reinterpret_cast<const char *>(extension_area_ref), sizeof(extension_area_ref));if (!out.good()) {std::cerr << "can't dump the tga file\n";out.close();return false;}out.write(reinterpret_cast<const char *>(footer), sizeof(footer));if (!out.good()) {std::cerr << "can't dump the tga file\n";out.close();return false;}out.close();return true;
}// TODO: it is not necessary to break a raw chunk for two equal pixels (for the matter of the resulting size)
bool TGAImage::unload_rle_data(std::ofstream &out) const {const std::uint8_t max_chunk_length = 128;size_t npixels = w*h;size_t curpix = 0;while (curpix<npixels) {size_t chunkstart = curpix*bpp;size_t curbyte = curpix*bpp;std::uint8_t run_length = 1;bool raw = true;while (curpix+run_length<npixels && run_length<max_chunk_length) {bool succ_eq = true;for (int t=0; succ_eq && t<bpp; t++)succ_eq = (data[curbyte+t]==data[curbyte+t+bpp]);curbyte += bpp;if (1==run_length)raw = !succ_eq;if (raw && succ_eq) {run_length--;break;}if (!raw && !succ_eq)break;run_length++;}curpix += run_length;out.put(raw?run_length-1:run_length+127);if (!out.good()) {std::cerr << "can't dump the tga file\n";return false;}out.write(reinterpret_cast<const char *>(data.data()+chunkstart), (raw?run_length*bpp:bpp));if (!out.good()) {std::cerr << "can't dump the tga file\n";return false;}}return true;
}TGAColor TGAImage::get(const int x, const int y) const {if (!data.size() || x<0 || y<0 || x>=w || y>=h)return {};return TGAColor(data.data()+(x+y*w)*bpp, bpp);
}void TGAImage::set(int x, int y, const TGAColor &c) {if (!data.size() || x<0 || y<0 || x>=w || y>=h) return;memcpy(data.data()+(x+y*w)*bpp, c.bgra, bpp);
}void TGAImage::flip_horizontally() {int half = w>>1;for (int i=0; i<half; i++)for (int j=0; j<h; j++)for (int b=0; b<bpp; b++)std::swap(data[(i+j*w)*bpp+b], data[(w-1-i+j*w)*bpp+b]);
}void TGAImage::flip_vertically() {int half = h>>1;for (int i=0; i<w; i++)for (int j=0; j<half; j++)for (int b=0; b<bpp; b++)std::swap(data[(i+j*w)*bpp+b], data[(i+(h-1-j)*w)*bpp+b]);
}int TGAImage::width() const {return w;
}int TGAImage::height() const {return h;
}
写一个测试来确保环境正常
#include "tgaimage.h"
const TGAColor white = TGAColor(255, 255, 255, 255);
const TGAColor red = TGAColor(255, 0, 0, 255);
int main(int argc, char** argv) {TGAImage image(100, 100, TGAImage::RGB);image.set(52, 41, red);image.flip_vertically(); // 垂直方向翻转图片,反转y坐标,作者解释是希望图片的原点在左下角,但很多库原点都在左上角image.write_tga_file("output.tga");return 0;
}
运行后图片如下
Lesson 1: Bresenham’s Line Drawing Algorithm(画线算法)
首先进行初始化,在图上标记三个位置
#include "tgaimage.h"
constexpr TGAColor white = {255, 255, 255, 255}; // attention, BGRA order
constexpr TGAColor green = { 0, 255, 0, 255};
constexpr TGAColor red = { 255, 0, 0, 255};
constexpr TGAColor blue = {255, 128, 64, 255};
constexpr TGAColor yellow = { 0, 200, 255, 255};
int main(int argc, char** argv) {constexpr int width = 64;constexpr int height = 64;TGAImage framebuffer(width, height, TGAImage::RGB);int ax = 7, ay = 3;int bx = 12, by = 37;int cx = 62, cy = 53;framebuffer.set(ax, ay, white);framebuffer.set(bx, by, white);framebuffer.set(cx, cy, white);framebuffer.write_tga_file("framebuffer.tga");return 0;
}
得到结果如下

首先来学习下如何在像素上画一条线
第一次尝试:想象用参数t来表示的一个在 x a 和 x b x_a和x_b xa和xb之间的点 ( x ( t ) , y ( t ) ) (x(t),y(t)) (x(t),y(t))
{ x ( t ) = a x + t ⋅ ( b x − a x ) y ( t ) = a y + t ⋅ ( b y − a y ) \begin{cases} x(t) = a_x + t \cdot (b_x - a_x) \\ y(t) = a_y + t \cdot (b_y - a_y) \end{cases} {x(t)=ax+t⋅(bx−ax)y(t)=ay+t⋅(by−ay)
如果我们变换一下形式就会发现,这就是插值的公式
{ x ( t ) = ( 1 − t ) ⋅ a x + t ⋅ b x y ( t ) = ( 1 − t ) ⋅ a y + t ⋅ b y \begin{cases} x(t) = (1-t) \cdot a_x + t \cdot b_x \\ y(t) = (1-t) \cdot a_y + t \cdot b_y \end{cases} {x(t)=(1−t)⋅ax+t⋅bxy(t)=(1−t)⋅ay+t⋅by
下面来尝试一下通过控制t来绘制这条直线
void drawLine_first(int x1,int y1,int x2,int y2,TGAImage &img,TGAColor color){for(float t = 0;t<=1;t+=0.02){int x = std::round(x1 + t * (x2-x1)); // round会进行四舍五入int y = std::round(y1 + t * (y2-y1));img.set(x,y,color);}
}
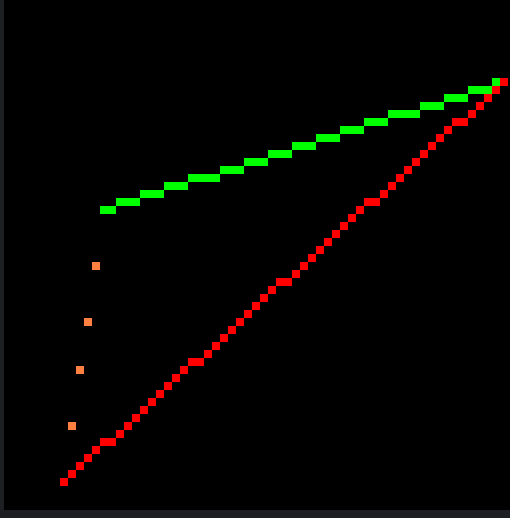
考虑左下角的a点和右上角的c点,如果我从a向c绘制一次,再从c向a绘制一次,结果如下
图中能明显看出问题,一是在x上有缝隙,二是不同的绘制方向结果是不同的,
第三另外t步长的设置也不容易控制
接下来看第二种尝试,代码的改变写在了注释中
void drawLine_Second(int ax, int ay, int bx, int by, TGAImage &img, TGAColor color){for (int x = ax ; x<= bx; x++) { // 不再以t控制,而是以x的进行进行控制,保证了水平方向上不会有空隙// 如果不加强制转换,当分子分母都是整数时,计算结果的小数部分会被截断float t = (x-ax)/static_cast<float>(bx-ax); // 变换了形式,表示出当x移动一格时,t是多少,int y = std::round( ay + (by-ay)*t );img.set(x, y, color);}
}
这里碰到了Cpp的static_cast,顺便学习一下是什么
隐式转换(Implicit Conversion):编译器或解释器自动完成的类型转换,无需程序员显式指定。
显式转换(Explicit Conversion):程序员主动指定的类型转换,通常通过语法或函数强制实现。
static_cast是 C++ 中一种显式类型转换操作符,用于在编译时进行类型转换,适用场景:明确的、安全的类型转换(如基本类型转换、向上转换、void* 转换),不用c语言风格的强制转换是为了规避风险。
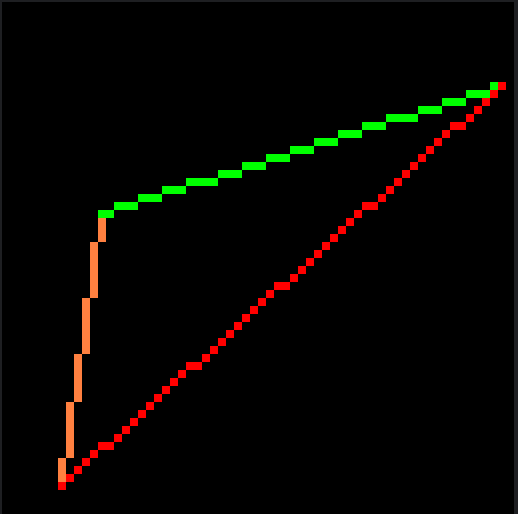
从下图看到问题2,3已经解决了,原本有的问题1空隙也没有了,但是出现了新的很大的空隙,甚至一条线直接消失了
线消失比较好解决,原因就是从右上角向左下角画线,if就进不去
void drawLine_Second(int ax, int ay, int bx, int by, TGAImage &img, TGAColor color){if (ax>bx) { // make it left−to−rightstd::swap(ax, bx);std::swap(ay, by);}for (int x = ax ; x<= bx; x++) { // 不再以t控制,而是以x的进行进行控制,保证了水平方向上不会有空隙// 如果不加强制转换,当分子分母都是整数时,计算结果的小数部分会被截断float t = (x-ax)/static_cast<float>(bx-ax); // 变换了形式,表示出当x移动一格时,t是多少,int y = std::round( ay + (by-ay)*t );img.set(x, y, color);}
}
下面就要解决a->b这么大空隙了,这个问题就是斜率大的线段的采样不足,因为x只走了几步就到了,也就只会画出几个点
接下来进行第三次尝试,解决思路就是如果斜率太大,就从y进行for,而不是x,教程中的解决思路十分巧妙,如果斜率太大,就交换x坐标和y坐标,同时绘制时绘制坐标变成 ( y , x ) (y,x) (y,x)
// 最终版本
void drawLine(int ax, int ay, int bx, int by, TGAImage &framebuffer, TGAColor color) {bool steep = std::abs(ax-bx) < std::abs(ay-by);if (steep) { // if the drawLine is steep, we transpose the imagestd::swap(ax, ay);std::swap(bx, by);}if (ax>bx) { // make it left−to−rightstd::swap(ax, bx);std::swap(ay, by);}int y = ay;int ierror = 0;for (int x=ax; x<=bx; x++) {if (steep) // if transposed, de−transposeframebuffer.set(y, x, color);elseframebuffer.set(x, y, color);ierror += 2 * std::abs(by-ay);y += (by > ay ? 1 : -1) * (ierror > bx - ax);ierror -= 2 * (bx-ax) * (ierror > bx - ax);}
}
至此就完成了比较好的效果的直线绘制,第四次尝试是如何优化算法的运行速度,这里就不说了,直接上他最终的优化代码作为后续使用,但是走样(锯齿)问题没有解决,这里不详细说,后边课程肯定会涉及到。
Lesson 2: Triangle rasterization 三角形光栅化
本节课目的是画一个实心的三角形(上节课只画了边)
首先提供一个画线框三角形的代码
constexpr int width = 128;
constexpr int height = 128;
// 绘制一个三角形
void drawTriangle(int ax, int ay, int bx, int by, int cx, int cy, TGAImage &framebuffer, TGAColor color) {drawLine(ax, ay, bx, by, framebuffer, color);drawLine(bx, by, cx, cy, framebuffer, color);drawLine(cx, cy, ax, ay, framebuffer, color);
}
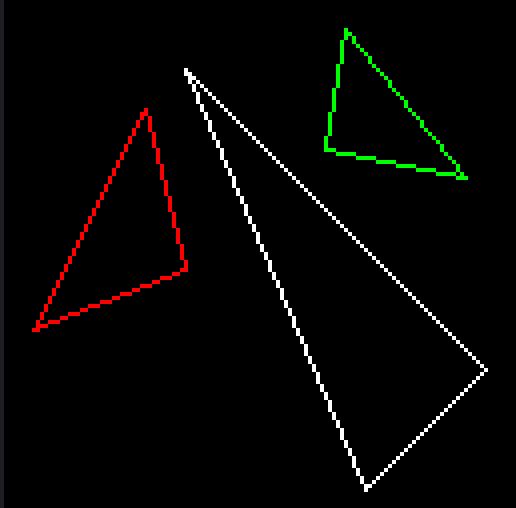
// 绘制三个三角形进行测试
int main(int argc, char** argv) {TGAImage framebuffer(width, height, TGAImage::RGB);drawTriangle( 7, 45, 35, 100, 45, 60, framebuffer, red);drawTriangle(120, 35, 90, 5, 45, 110, framebuffer, white);drawTriangle(115, 83, 80, 90, 85, 120, framebuffer, green);framebuffer.write_tga_file("framebuffer.tga");return 0;
}
填充三角形需要做的事情:
- 它应该简单快捷
- 它应该是对称的 —— 输出不应该依赖于传递给函数的顶点顺序
- 如果两个三角形共享两个顶点,由于光栅化舍入误差,它们之间不应该有间隙
Scanline rendering 线性扫描
这块不是很想实现,因为学过games101后,已经知道更好的方法是什么了😂,这里参考别的博客看看原理是啥吧。
https://blog.csdn.net/qq_42987967/article/details/124831459
思路就是先对顶点y坐标进行排序,并从中间顶点水平切一刀,这样扫描时比例变化是正常的不会突然反向,交点A沿t0到t2的主斜边移动,B沿t0到t1的侧边移动,移动过程中填充内部的像素

void triangle(Vec2i t0, Vec2i t1, Vec2i t2, TGAImage &image, TGAColor color) { // sort the vertices, t0, t1, t2 lower−to−upper (bubblesort yay!) if (t0.y>t1.y) std::swap(t0, t1); if (t0.y>t2.y) std::swap(t0, t2); if (t1.y>t2.y) std::swap(t1, t2); int total_height = t2.y-t0.y; for (int y=t0.y; y<=t1.y; y++) { int segment_height = t1.y-t0.y+1; float alpha = (float)(y-t0.y)/total_height; float beta = (float)(y-t0.y)/segment_height; // be careful with divisions by zero Vec2i A = t0 + (t2-t0)*alpha; Vec2i B = t0 + (t1-t0)*beta; if (A.x>B.x) std::swap(A, B); for (int j=A.x; j<=B.x; j++) { image.set(j, y, color); // attention, due to int casts t0.y+i != A.y } } for (int y=t1.y; y<=t2.y; y++) { int segment_height = t2.y-t1.y+1; float alpha = (float)(y-t0.y)/total_height; float beta = (float)(y-t1.y)/segment_height; // be careful with divisions by zero Vec2i A = t0 + (t2-t0)*alpha; Vec2i B = t1 + (t2-t1)*beta; if (A.x>B.x) std::swap(A, B); for (int j=A.x; j<=B.x; j++) { image.set(j, y, color); // attention, due to int casts t0.y+i != A.y } }
}
Modern rasterization approach 现代栅格化方法
基本思路就是用包围盒围住三角形,减少需要遍历的三角形数量,之后遍历盒子中每个像素,判断是否在三角形内部,伪代码如下
triangle(vec2 points[3]) {vec2 bbox[2] = find_bounding_box(points);for (each pixel in the bounding box) {if (inside(points, pixel)) {put_pixel(pixel);}}
}
首先是包围盒的建立,其实就找三个顶点的最大值和最小值,就能画出一个围住三角形最小的矩形
int bbminx = std::min(std::min(ax, bx), cx); // bounding box for the triangleint bbminy = std::min(std::min(ay, by), cy); // defined by its top left and bottom right cornersint bbmaxx = std::max(std::max(ax, bx), cx);int bbmaxy = std::max(std::max(ay, by), cy);
之后就是剔除不在三角形内部的像素,在games101提供的方法是用像素坐标叉乘三条边顺序组成的向量,如果叉乘结果都在一个方向,那这个像素点就在三角形内部,在这个教程中并不是这样做的,它是利用重心坐标,计算出一个点对于这个三角形的重心坐标 ( α , β , γ ) (\alpha,\beta,\gamma) (α,β,γ),只要有一个是负数,就表示不再三角形内,那就用他这种方法吧。重心坐标反映的是划分为三个小三角形的面积比,如果点在三角形外,那面积算出来就成负数了。
首先提供一个算三角形面积的函数
double signed_triangle_area(int ax, int ay, int bx, int by, int cx, int cy) {return .5*((by-ay)*(bx+ax) + (cy-by)*(cx+bx) + (ay-cy)*(ax+cx));
}
下来就可以用面积比来求重心坐标了
#pragma omp parallel forfor (int x=bbminx; x<=bbmaxx; x++) {for (int y=bbminy; y<=bbmaxy; y++) {double alpha = signed_triangle_area(x, y, bx, by, cx, cy) / total_area;double beta = signed_triangle_area(x, y, cx, cy, ax, ay) / total_area;double gamma = signed_triangle_area(x, y, ax, ay, bx, by) / total_area;if (alpha<0 || beta<0 || gamma<0) continue; // negative barycentric coordinate => the pixel is outside the triangleframebuffer.set(x, y, color);}}
}
#pragma omp parallel for是OpenMP中的一个指令,用于并行化for循环。OpenMP是一种并行编程模型,可以在支持OpenMP的编译器上使用
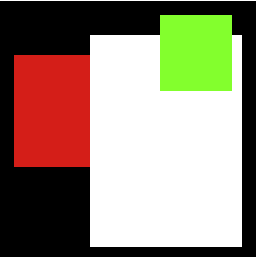
最终的三角形绘制如下
// 绘制一个三角形
void drawTriangle(int ax, int ay, int bx, int by, int cx, int cy, TGAImage &framebuffer, TGAColor color) {int bbminx = std::min(std::min(ax, bx), cx); // bounding box for the triangleint bbminy = std::min(std::min(ay, by), cy); // defined by its top left and bottom right cornersint bbmaxx = std::max(std::max(ax, bx), cx);int bbmaxy = std::max(std::max(ay, by), cy);double total_area = signed_triangle_area(ax, ay, bx, by, cx, cy);#pragma omp parallel forfor (int x=bbminx; x<=bbmaxx; x++) {for (int y=bbminy; y<=bbmaxy; y++) {double alpha = signed_triangle_area(x, y, bx, by, cx, cy) / total_area;double beta = signed_triangle_area(x, y, cx, cy, ax, ay) / total_area;double gamma = signed_triangle_area(x, y, ax, ay, bx, by) / total_area;if (alpha<0 || beta<0 || gamma<0) continue; // negative barycentric coordinate => the pixel is outside the triangleframebuffer.set(x, y, color);}}
}

back-face culling 背面剔除
一般来说法线背对相机或光线方向的平面可认为是没用的,可以不用绘制将其剔除以减少运算量。原理是如果正面的三角形都是顺时针,那背面的都是逆时针,另外一种方法是计算三角形法向量与摄像机的点乘,小于0说明它是背对的。
在第2课中使用的是计算三角形的面积,下面这个代码是带符号的,所以负的面积说明三角形是背对的。
double signed_triangle_area(int ax, int ay, int bx, int by, int cx, int cy) {return .5*((by-ay)*(bx+ax) + (cy-by)*(cx+bx) + (ay-cy)*(ax+cx));
}
在这里引入向量和模型导入的函数
vector.h
生成下图,可以看出来把所有三角形全画出来,脸部轮廓都不见了

修改三角形绘制函数,如果计算出来的三角形面积是负数,就直接不绘制了,这里设置小于1,是把面积太小的三角形直接省略了
void drawTriangle(int ax, int ay, int bx, int by, int cx, int cy, TGAImage &framebuffer, TGAColor color) {int bbminx = std::min(std::min(ax, bx), cx);int bbminy = std::min(std::min(ay, by), cy);int bbmaxx = std::max(std::max(ax, bx), cx);int bbmaxy = std::max(std::max(ay, by), cy);double total_area = signed_triangle_area(ax, ay, bx, by, cx, cy);if (total_area<1) return;#pragma omp parallel forfor (int x=bbminx; x<=bbmaxx; x++) {for (int y=bbminy; y<=bbmaxy; y++) {double alpha = signed_triangle_area(x, y, bx, by, cx, cy) / total_area;double beta = signed_triangle_area(x, y, cx, cy, ax, ay) / total_area;double gamma = signed_triangle_area(x, y, ax, ay, bx, by) / total_area;if (alpha<0 || beta<0 || gamma<0) continue;framebuffer.set(x, y, color);}}
}
修改后明显可以看出脸部轮廓出来了
使用2k分辨率,效果更好了
Lesson 3: Hidden faces removal (z buffer)
首先介绍一下代码变动
模型获取使用开源库
//
// Created by LEI XU on 4/28/19.
//
//
// This loader is created by Robert Smith.
// https://github.com/Bly7/OBJ-Loader
// Use the MIT license.#ifndef RASTERIZER_OBJ_LOADER_H
#define RASTERIZER_OBJ_LOADER_H#pragma once#include <iostream>
#include <vector>
#include <string>
#include <fstream>
#include <math.h>// Print progress to console while loading (large models)
#define OBJL_CONSOLE_OUTPUT// Namespace: OBJL
//
// Description: The namespace that holds eveyrthing that
// is needed and used for the OBJ Model Loader
namespace objl
{// Structure: Vector2//// Description: A 2D Vector that Holds Positional Datastruct Vector2{// Default ConstructorVector2(){X = 0.0f;Y = 0.0f;}// Variable Set ConstructorVector2(float X_, float Y_){X = X_;Y = Y_;}// Bool Equals Operator Overloadbool operator==(const Vector2& other) const{return (this->X == other.X && this->Y == other.Y);}// Bool Not Equals Operator Overloadbool operator!=(const Vector2& other) const{return !(this->X == other.X && this->Y == other.Y);}// Addition Operator OverloadVector2 operator+(const Vector2& right) const{return Vector2(this->X + right.X, this->Y + right.Y);}// Subtraction Operator OverloadVector2 operator-(const Vector2& right) const{return Vector2(this->X - right.X, this->Y - right.Y);}// Float Multiplication Operator OverloadVector2 operator*(const float& other) const{return Vector2(this->X *other, this->Y * other);}// Positional Variablesfloat X;float Y;};// Structure: Vector3//// Description: A 3D Vector that Holds Positional Datastruct Vector3{// Default ConstructorVector3(){X = 0.0f;Y = 0.0f;Z = 0.0f;}// Variable Set ConstructorVector3(float X_, float Y_, float Z_){X = X_;Y = Y_;Z = Z_;}// Bool Equals Operator Overloadbool operator==(const Vector3& other) const{return (this->X == other.X && this->Y == other.Y && this->Z == other.Z);}// Bool Not Equals Operator Overloadbool operator!=(const Vector3& other) const{return !(this->X == other.X && this->Y == other.Y && this->Z == other.Z);}// Addition Operator OverloadVector3 operator+(const Vector3& right) const{return Vector3(this->X + right.X, this->Y + right.Y, this->Z + right.Z);}// Subtraction Operator OverloadVector3 operator-(const Vector3& right) const{return Vector3(this->X - right.X, this->Y - right.Y, this->Z - right.Z);}// Float Multiplication Operator OverloadVector3 operator*(const float& other) const{return Vector3(this->X * other, this->Y * other, this->Z * other);}// Float Division Operator OverloadVector3 operator/(const float& other) const{return Vector3(this->X / other, this->Y / other, this->Z / other);}// Positional Variablesfloat X;float Y;float Z;};// Structure: Vertex//// Description: Model Vertex object that holds// a Position, Normal, and Texture Coordinatestruct Vertex{// Position VectorVector3 Position;// Normal VectorVector3 Normal;// Texture Coordinate VectorVector2 TextureCoordinate;};struct Material{Material(){name;Ns = 0.0f;Ni = 0.0f;d = 0.0f;illum = 0;}// Material Namestd::string name;// Ambient ColorVector3 Ka;// Diffuse ColorVector3 Kd;// Specular ColorVector3 Ks;// Specular Exponentfloat Ns;// Optical Densityfloat Ni;// Dissolvefloat d;// Illuminationint illum;// Ambient Texture Mapstd::string map_Ka;// Diffuse Texture Mapstd::string map_Kd;// Specular Texture Mapstd::string map_Ks;// Specular Hightlight Mapstd::string map_Ns;// Alpha Texture Mapstd::string map_d;// Bump Mapstd::string map_bump;};// Structure: Mesh//// Description: A Simple Mesh Object that holds// a name, a vertex list, and an index liststruct Mesh{// Default ConstructorMesh(){}// Variable Set ConstructorMesh(std::vector<Vertex>& _Vertices, std::vector<unsigned int>& _Indices){Vertices = _Vertices;Indices = _Indices;}// Mesh Namestd::string MeshName;// Vertex Liststd::vector<Vertex> Vertices;// Index Liststd::vector<unsigned int> Indices;// MaterialMaterial MeshMaterial;};// Namespace: Math//// Description: The namespace that holds all of the math// functions need for OBJLnamespace math{// Vector3 Cross ProductVector3 CrossV3(const Vector3 a, const Vector3 b){return Vector3(a.Y * b.Z - a.Z * b.Y,a.Z * b.X - a.X * b.Z,a.X * b.Y - a.Y * b.X);}// Vector3 Magnitude Calculationfloat MagnitudeV3(const Vector3 in){return (sqrtf(powf(in.X, 2) + powf(in.Y, 2) + powf(in.Z, 2)));}// Vector3 DotProductfloat DotV3(const Vector3 a, const Vector3 b){return (a.X * b.X) + (a.Y * b.Y) + (a.Z * b.Z);}// Angle between 2 Vector3 Objectsfloat AngleBetweenV3(const Vector3 a, const Vector3 b){float angle = DotV3(a, b);angle /= (MagnitudeV3(a) * MagnitudeV3(b));return angle = acosf(angle);}// Projection Calculation of a onto bVector3 ProjV3(const Vector3 a, const Vector3 b){Vector3 bn = b / MagnitudeV3(b);return bn * DotV3(a, bn);}}// Namespace: Algorithm//// Description: The namespace that holds all of the// Algorithms needed for OBJLnamespace algorithm{// Vector3 Multiplication Opertor OverloadVector3 operator*(const float& left, const Vector3& right){return Vector3(right.X * left, right.Y * left, right.Z * left);}// A test to see if P1 is on the same side as P2 of a line segment abbool SameSide(Vector3 p1, Vector3 p2, Vector3 a, Vector3 b){Vector3 cp1 = math::CrossV3(b - a, p1 - a);Vector3 cp2 = math::CrossV3(b - a, p2 - a);if (math::DotV3(cp1, cp2) >= 0)return true;elsereturn false;}// Generate a cross produect normal for a triangleVector3 GenTriNormal(Vector3 t1, Vector3 t2, Vector3 t3){Vector3 u = t2 - t1;Vector3 v = t3 - t1;Vector3 normal = math::CrossV3(u,v);return normal;}// Check to see if a Vector3 Point is within a 3 Vector3 Trianglebool inTriangle(Vector3 point, Vector3 tri1, Vector3 tri2, Vector3 tri3){// Test to see if it is within an infinite prism that the triangle outlines.bool within_tri_prisim = SameSide(point, tri1, tri2, tri3) && SameSide(point, tri2, tri1, tri3)&& SameSide(point, tri3, tri1, tri2);// If it isn't it will never be on the triangleif (!within_tri_prisim)return false;// Calulate Triangle's NormalVector3 n = GenTriNormal(tri1, tri2, tri3);// Project the point onto this normalVector3 proj = math::ProjV3(point, n);// If the distance from the triangle to the point is 0// it lies on the triangleif (math::MagnitudeV3(proj) == 0)return true;elsereturn false;}// Split a String into a string array at a given tokeninline void split(const std::string &in,std::vector<std::string> &out,std::string token){out.clear();std::string temp;for (int i = 0; i < int(in.size()); i++){std::string test = in.substr(i, token.size());if (test == token){if (!temp.empty()){out.push_back(temp);temp.clear();i += (int)token.size() - 1;}else{out.push_back("");}}else if (i + token.size() >= in.size()){temp += in.substr(i, token.size());out.push_back(temp);break;}else{temp += in[i];}}}// Get tail of string after first token and possibly following spacesinline std::string tail(const std::string &in){size_t token_start = in.find_first_not_of(" \t");size_t space_start = in.find_first_of(" \t", token_start);size_t tail_start = in.find_first_not_of(" \t", space_start);size_t tail_end = in.find_last_not_of(" \t");if (tail_start != std::string::npos && tail_end != std::string::npos){return in.substr(tail_start, tail_end - tail_start + 1);}else if (tail_start != std::string::npos){return in.substr(tail_start);}return "";}// Get first token of stringinline std::string firstToken(const std::string &in){if (!in.empty()){size_t token_start = in.find_first_not_of(" \t");size_t token_end = in.find_first_of(" \t", token_start);if (token_start != std::string::npos && token_end != std::string::npos){return in.substr(token_start, token_end - token_start);}else if (token_start != std::string::npos){return in.substr(token_start);}}return "";}// Get element at given index positiontemplate <class T>inline const T & getElement(const std::vector<T> &elements, std::string &index){int idx = std::stoi(index);if (idx < 0)idx = int(elements.size()) + idx;elseidx--;return elements[idx];}}// Class: Loader//// Description: The OBJ Model Loaderclass Loader{public:// Default ConstructorLoader(){}~Loader(){LoadedMeshes.clear();}// Load a file into the loader//// If file is loaded return true//// If the file is unable to be found// or unable to be loaded return falsebool LoadFile(std::string Path){// If the file is not an .obj file return falseif (Path.substr(Path.size() - 4, 4) != ".obj")return false;std::ifstream file(Path);if (!file.is_open())return false;LoadedMeshes.clear();LoadedVertices.clear();LoadedIndices.clear();std::vector<Vector3> Positions;std::vector<Vector2> TCoords;std::vector<Vector3> Normals;std::vector<Vertex> Vertices;std::vector<unsigned int> Indices;std::vector<std::string> MeshMatNames;bool listening = false;std::string meshname;Mesh tempMesh;#ifdef OBJL_CONSOLE_OUTPUTconst unsigned int outputEveryNth = 1000;unsigned int outputIndicator = outputEveryNth;
#endifstd::string curline;while (std::getline(file, curline)){
#ifdef OBJL_CONSOLE_OUTPUTif ((outputIndicator = ((outputIndicator + 1) % outputEveryNth)) == 1){if (!meshname.empty()){std::cout<< "\r- " << meshname<< "\t| vertices > " << Positions.size()<< "\t| texcoords > " << TCoords.size()<< "\t| normals > " << Normals.size()<< "\t| triangles > " << (Vertices.size() / 3)<< (!MeshMatNames.empty() ? "\t| material: " + MeshMatNames.back() : "");}}
#endif// Generate a Mesh Object or Prepare for an object to be createdif (algorithm::firstToken(curline) == "o" || algorithm::firstToken(curline) == "g" || curline[0] == 'g'){if (!listening){listening = true;if (algorithm::firstToken(curline) == "o" || algorithm::firstToken(curline) == "g"){meshname = algorithm::tail(curline);}else{meshname = "unnamed";}}else{// Generate the mesh to put into the arrayif (!Indices.empty() && !Vertices.empty()){// Create MeshtempMesh = Mesh(Vertices, Indices);tempMesh.MeshName = meshname;// Insert MeshLoadedMeshes.push_back(tempMesh);// CleanupVertices.clear();Indices.clear();meshname.clear();meshname = algorithm::tail(curline);}else{if (algorithm::firstToken(curline) == "o" || algorithm::firstToken(curline) == "g"){meshname = algorithm::tail(curline);}else{meshname = "unnamed";}}}
#ifdef OBJL_CONSOLE_OUTPUTstd::cout << std::endl;outputIndicator = 0;
#endif}// Generate a Vertex Positionif (algorithm::firstToken(curline) == "v"){std::vector<std::string> spos;Vector3 vpos;algorithm::split(algorithm::tail(curline), spos, " ");vpos.X = std::stof(spos[0]);vpos.Y = std::stof(spos[1]);vpos.Z = std::stof(spos[2]);Positions.push_back(vpos);}// Generate a Vertex Texture Coordinateif (algorithm::firstToken(curline) == "vt"){std::vector<std::string> stex;Vector2 vtex;algorithm::split(algorithm::tail(curline), stex, " ");vtex.X = std::stof(stex[0]);vtex.Y = std::stof(stex[1]);TCoords.push_back(vtex);}// Generate a Vertex Normal;if (algorithm::firstToken(curline) == "vn"){std::vector<std::string> snor;Vector3 vnor;algorithm::split(algorithm::tail(curline), snor, " ");vnor.X = std::stof(snor[0]);vnor.Y = std::stof(snor[1]);vnor.Z = std::stof(snor[2]);Normals.push_back(vnor);}// Generate a Face (vertices & indices)if (algorithm::firstToken(curline) == "f"){// Generate the verticesstd::vector<Vertex> vVerts;GenVerticesFromRawOBJ(vVerts, Positions, TCoords, Normals, curline);// Add Verticesfor (int i = 0; i < int(vVerts.size()); i++){Vertices.push_back(vVerts[i]);LoadedVertices.push_back(vVerts[i]);}std::vector<unsigned int> iIndices;VertexTriangluation(iIndices, vVerts);// Add Indicesfor (int i = 0; i < int(iIndices.size()); i++){unsigned int indnum = (unsigned int)((Vertices.size()) - vVerts.size()) + iIndices[i];Indices.push_back(indnum);indnum = (unsigned int)((LoadedVertices.size()) - vVerts.size()) + iIndices[i];LoadedIndices.push_back(indnum);}}// Get Mesh Material Nameif (algorithm::firstToken(curline) == "usemtl"){MeshMatNames.push_back(algorithm::tail(curline));// Create new Mesh, if Material changes within a groupif (!Indices.empty() && !Vertices.empty()){// Create MeshtempMesh = Mesh(Vertices, Indices);tempMesh.MeshName = meshname;int i = 2;while(1) {tempMesh.MeshName = meshname + "_" + std::to_string(i);for (auto &m : LoadedMeshes)if (m.MeshName == tempMesh.MeshName)continue;break;}// Insert MeshLoadedMeshes.push_back(tempMesh);// CleanupVertices.clear();Indices.clear();}#ifdef OBJL_CONSOLE_OUTPUToutputIndicator = 0;
#endif}// Load Materialsif (algorithm::firstToken(curline) == "mtllib"){// Generate LoadedMaterial// Generate a path to the material filestd::vector<std::string> temp;algorithm::split(Path, temp, "/");std::string pathtomat = "";if (temp.size() != 1){for (int i = 0; i < temp.size() - 1; i++){pathtomat += temp[i] + "/";}}pathtomat += algorithm::tail(curline);#ifdef OBJL_CONSOLE_OUTPUTstd::cout << std::endl << "- find materials in: " << pathtomat << std::endl;
#endif// Load MaterialsLoadMaterials(pathtomat);}}#ifdef OBJL_CONSOLE_OUTPUTstd::cout << std::endl;
#endif// Deal with last meshif (!Indices.empty() && !Vertices.empty()){// Create MeshtempMesh = Mesh(Vertices, Indices);tempMesh.MeshName = meshname;// Insert MeshLoadedMeshes.push_back(tempMesh);}file.close();// Set Materials for each Meshfor (int i = 0; i < MeshMatNames.size(); i++){std::string matname = MeshMatNames[i];// Find corresponding material name in loaded materials// when found copy material variables into mesh materialfor (int j = 0; j < LoadedMaterials.size(); j++){if (LoadedMaterials[j].name == matname){LoadedMeshes[i].MeshMaterial = LoadedMaterials[j];break;}}}if (LoadedMeshes.empty() && LoadedVertices.empty() && LoadedIndices.empty()){return false;}else{return true;}}// Loaded Mesh Objectsstd::vector<Mesh> LoadedMeshes;// Loaded Vertex Objectsstd::vector<Vertex> LoadedVertices;// Loaded Index Positionsstd::vector<unsigned int> LoadedIndices;// Loaded Material Objectsstd::vector<Material> LoadedMaterials;private:// Generate vertices from a list of positions,// tcoords, normals and a face linevoid GenVerticesFromRawOBJ(std::vector<Vertex>& oVerts,const std::vector<Vector3>& iPositions,const std::vector<Vector2>& iTCoords,const std::vector<Vector3>& iNormals,std::string icurline){std::vector<std::string> sface, svert;Vertex vVert;algorithm::split(algorithm::tail(icurline), sface, " ");bool noNormal = false;// For every given vertex do thisfor (int i = 0; i < int(sface.size()); i++){// See What type the vertex is.int vtype;algorithm::split(sface[i], svert, "/");// Check for just position - v1if (svert.size() == 1){// Only positionvtype = 1;}// Check for position & texture - v1/vt1if (svert.size() == 2){// Position & Texturevtype = 2;}// Check for Position, Texture and Normal - v1/vt1/vn1// or if Position and Normal - v1//vn1if (svert.size() == 3){if (svert[1] != ""){// Position, Texture, and Normalvtype = 4;}else{// Position & Normalvtype = 3;}}// Calculate and store the vertexswitch (vtype){case 1: // P{vVert.Position = algorithm::getElement(iPositions, svert[0]);vVert.TextureCoordinate = Vector2(0, 0);noNormal = true;oVerts.push_back(vVert);break;}case 2: // P/T{vVert.Position = algorithm::getElement(iPositions, svert[0]);vVert.TextureCoordinate = algorithm::getElement(iTCoords, svert[1]);noNormal = true;oVerts.push_back(vVert);break;}case 3: // P//N{vVert.Position = algorithm::getElement(iPositions, svert[0]);vVert.TextureCoordinate = Vector2(0, 0);vVert.Normal = algorithm::getElement(iNormals, svert[2]);oVerts.push_back(vVert);break;}case 4: // P/T/N{vVert.Position = algorithm::getElement(iPositions, svert[0]);vVert.TextureCoordinate = algorithm::getElement(iTCoords, svert[1]);vVert.Normal = algorithm::getElement(iNormals, svert[2]);oVerts.push_back(vVert);break;}default:{break;}}}// take care of missing normals// these may not be truly acurate but it is the// best they get for not compiling a mesh with normalsif (noNormal){Vector3 A = oVerts[0].Position - oVerts[1].Position;Vector3 B = oVerts[2].Position - oVerts[1].Position;Vector3 normal = math::CrossV3(A, B);for (int i = 0; i < int(oVerts.size()); i++){oVerts[i].Normal = normal;}}}// Triangulate a list of vertices into a face by printing// inducies corresponding with triangles within itvoid VertexTriangluation(std::vector<unsigned int>& oIndices,const std::vector<Vertex>& iVerts){// If there are 2 or less verts,// no triangle can be created,// so exitif (iVerts.size() < 3){return;}// If it is a triangle no need to calculate itif (iVerts.size() == 3){oIndices.push_back(0);oIndices.push_back(1);oIndices.push_back(2);return;}// Create a list of verticesstd::vector<Vertex> tVerts = iVerts;while (true){// For every vertexfor (int i = 0; i < int(tVerts.size()); i++){// pPrev = the previous vertex in the listVertex pPrev;if (i == 0){pPrev = tVerts[tVerts.size() - 1];}else{pPrev = tVerts[i - 1];}// pCur = the current vertex;Vertex pCur = tVerts[i];// pNext = the next vertex in the listVertex pNext;if (i == tVerts.size() - 1){pNext = tVerts[0];}else{pNext = tVerts[i + 1];}// Check to see if there are only 3 verts left// if so this is the last triangleif (tVerts.size() == 3){// Create a triangle from pCur, pPrev, pNextfor (int j = 0; j < int(tVerts.size()); j++){if (iVerts[j].Position == pCur.Position)oIndices.push_back(j);if (iVerts[j].Position == pPrev.Position)oIndices.push_back(j);if (iVerts[j].Position == pNext.Position)oIndices.push_back(j);}tVerts.clear();break;}if (tVerts.size() == 4){// Create a triangle from pCur, pPrev, pNextfor (int j = 0; j < int(iVerts.size()); j++){if (iVerts[j].Position == pCur.Position)oIndices.push_back(j);if (iVerts[j].Position == pPrev.Position)oIndices.push_back(j);if (iVerts[j].Position == pNext.Position)oIndices.push_back(j);}Vector3 tempVec;for (int j = 0; j < int(tVerts.size()); j++){if (tVerts[j].Position != pCur.Position&& tVerts[j].Position != pPrev.Position&& tVerts[j].Position != pNext.Position){tempVec = tVerts[j].Position;break;}}// Create a triangle from pCur, pPrev, pNextfor (int j = 0; j < int(iVerts.size()); j++){if (iVerts[j].Position == pPrev.Position)oIndices.push_back(j);if (iVerts[j].Position == pNext.Position)oIndices.push_back(j);if (iVerts[j].Position == tempVec)oIndices.push_back(j);}tVerts.clear();break;}// If Vertex is not an interior vertexfloat angle = math::AngleBetweenV3(pPrev.Position - pCur.Position, pNext.Position - pCur.Position) * (180 / 3.14159265359);if (angle <= 0 && angle >= 180)continue;// If any vertices are within this trianglebool inTri = false;for (int j = 0; j < int(iVerts.size()); j++){if (algorithm::inTriangle(iVerts[j].Position, pPrev.Position, pCur.Position, pNext.Position)&& iVerts[j].Position != pPrev.Position&& iVerts[j].Position != pCur.Position&& iVerts[j].Position != pNext.Position){inTri = true;break;}}if (inTri)continue;// Create a triangle from pCur, pPrev, pNextfor (int j = 0; j < int(iVerts.size()); j++){if (iVerts[j].Position == pCur.Position)oIndices.push_back(j);if (iVerts[j].Position == pPrev.Position)oIndices.push_back(j);if (iVerts[j].Position == pNext.Position)oIndices.push_back(j);}// Delete pCur from the listfor (int j = 0; j < int(tVerts.size()); j++){if (tVerts[j].Position == pCur.Position){tVerts.erase(tVerts.begin() + j);break;}}// reset i to the start// -1 since loop will add 1 to iti = -1;}// if no triangles were createdif (oIndices.size() == 0)break;// if no more verticesif (tVerts.size() == 0)break;}}// Load Materials from .mtl filebool LoadMaterials(std::string path){// If the file is not a material file return falseif (path.substr(path.size() - 4, path.size()) != ".mtl")return false;std::ifstream file(path);// If the file is not found return falseif (!file.is_open())return false;Material tempMaterial;bool listening = false;// Go through each line looking for material variablesstd::string curline;while (std::getline(file, curline)){// new material and material nameif (algorithm::firstToken(curline) == "newmtl"){if (!listening){listening = true;if (curline.size() > 7){tempMaterial.name = algorithm::tail(curline);}else{tempMaterial.name = "none";}}else{// Generate the material// Push Back loaded MaterialLoadedMaterials.push_back(tempMaterial);// Clear Loaded MaterialtempMaterial = Material();if (curline.size() > 7){tempMaterial.name = algorithm::tail(curline);}else{tempMaterial.name = "none";}}}// Ambient Colorif (algorithm::firstToken(curline) == "Ka"){std::vector<std::string> temp;algorithm::split(algorithm::tail(curline), temp, " ");if (temp.size() != 3)continue;tempMaterial.Ka.X = std::stof(temp[0]);tempMaterial.Ka.Y = std::stof(temp[1]);tempMaterial.Ka.Z = std::stof(temp[2]);}// Diffuse Colorif (algorithm::firstToken(curline) == "Kd"){std::vector<std::string> temp;algorithm::split(algorithm::tail(curline), temp, " ");if (temp.size() != 3)continue;tempMaterial.Kd.X = std::stof(temp[0]);tempMaterial.Kd.Y = std::stof(temp[1]);tempMaterial.Kd.Z = std::stof(temp[2]);}// Specular Colorif (algorithm::firstToken(curline) == "Ks"){std::vector<std::string> temp;algorithm::split(algorithm::tail(curline), temp, " ");if (temp.size() != 3)continue;tempMaterial.Ks.X = std::stof(temp[0]);tempMaterial.Ks.Y = std::stof(temp[1]);tempMaterial.Ks.Z = std::stof(temp[2]);}// Specular Exponentif (algorithm::firstToken(curline) == "Ns"){tempMaterial.Ns = std::stof(algorithm::tail(curline));}// Optical Densityif (algorithm::firstToken(curline) == "Ni"){tempMaterial.Ni = std::stof(algorithm::tail(curline));}// Dissolveif (algorithm::firstToken(curline) == "d"){tempMaterial.d = std::stof(algorithm::tail(curline));}// Illuminationif (algorithm::firstToken(curline) == "illum"){tempMaterial.illum = std::stoi(algorithm::tail(curline));}// Ambient Texture Mapif (algorithm::firstToken(curline) == "map_Ka"){tempMaterial.map_Ka = algorithm::tail(curline);}// Diffuse Texture Mapif (algorithm::firstToken(curline) == "map_Kd"){tempMaterial.map_Kd = algorithm::tail(curline);}// Specular Texture Mapif (algorithm::firstToken(curline) == "map_Ks"){tempMaterial.map_Ks = algorithm::tail(curline);}// Specular Hightlight Mapif (algorithm::firstToken(curline) == "map_Ns"){tempMaterial.map_Ns = algorithm::tail(curline);}// Alpha Texture Mapif (algorithm::firstToken(curline) == "map_d"){tempMaterial.map_d = algorithm::tail(curline);}// Bump Mapif (algorithm::firstToken(curline) == "map_Bump" || algorithm::firstToken(curline) == "map_bump" || algorithm::firstToken(curline) == "bump"){tempMaterial.map_bump = algorithm::tail(curline);}}// Deal with last material// Push Back loaded MaterialLoadedMaterials.push_back(tempMaterial);// Test to see if anything was loaded// If not return falseif (LoadedMaterials.empty())return false;// If so return trueelsereturn true;}};
}
#endif //RASTERIZER_OBJ_LOADER_H线性代数使用Eigen库
三角形类
#ifndef TINYRENDERER_TRIANGLE_H
#define TINYRENDERER_TRIANGLE_H
#include <Eigen/Eigen>
using namespace Eigen;
class Triangle{
public:Eigen::Vector4f globalCoords[3];Eigen::Vector3f color[3];Eigen::Vector2f texCoords[3];Eigen::Vector3f normal[3];Eigen::Vector3f screenCoords[3];Triangle();void setGlobalCoords(int ind, Eigen::Vector4f ver);void setNormal(int ind, Eigen::Vector3f n);void setTexCoord(int ind,Eigen::Vector2f uv);void setScreenCoord(int ind,int width,int height);
};#endif //TINYRENDERER_TRIANGLE_H#include "Triangle.h"Triangle::Triangle() {globalCoords[0] << 0,0,0,1;globalCoords[1] << 0,0,0,1;globalCoords[2] << 0,0,0,1;color[0] << 0.0, 0.0, 0.0;color[1] << 0.0, 0.0, 0.0;color[2] << 0.0, 0.0, 0.0;texCoords[0] << 0.0, 0.0;texCoords[1] << 0.0, 0.0;texCoords[2] << 0.0, 0.0;
}void Triangle::setGlobalCoords(int ind, Vector4f ver){globalCoords[ind] = ver;
}
void Triangle::setNormal(int ind, Vector3f n){normal[ind] = n;
}
void Triangle::setTexCoord(int ind, Vector2f uv) {texCoords[ind] = uv;
}
// 简单实现正交投影
Vector3f world2screen(Vector4f globalCoord,int width,int height) {return Vector3f(int((globalCoord.x()+1.)*width/2.+.5), int((globalCoord.y()+1.)*height/2.+.5), globalCoord.z());
}
void Triangle::setScreenCoord(int ind,int width,int height) {screenCoords[ind] = world2screen(this->globalCoords[ind],width,height);
}模型类
#ifndef __MODEL_H__
#define __MODEL_H__#include <vector>
#include <Eigen/Eigen>
#include "Triangle.h"class Model {
private:
public:explicit Model(const char *filename);~Model();std::vector<Triangle> triangleList;};#endif //__MODEL_H__
#include "model.h"
#include "thirdParty/OBJ_Loader.h"
// 加载模型就直接用教程的代码了!
Model::Model(const char *filename) {objl::Loader Loader;Loader.LoadFile(filename);std::cout << "?";for (const auto &mesh: Loader.LoadedMeshes){for(int i=0;i<mesh.Vertices.size();i+=3){Triangle * t = new Triangle;for(int j=0;j<3;j++){t->setGlobalCoords(j, Vector4f(mesh.Vertices[i + j].Position.X, mesh.Vertices[i + j].Position.Y,mesh.Vertices[i + j].Position.Z, 1.0));t->setNormal(j,Vector3f(mesh.Vertices[i+j].Normal.X,mesh.Vertices[i+j].Normal.Y,mesh.Vertices[i+j].Normal.Z));t->setTexCoord(j,Vector2f(mesh.Vertices[i+j].TextureCoordinate.X, mesh.Vertices[i+j].TextureCoordinate.Y));}this->triangleList.push_back(*t);}}
}Model::~Model() {
}已经告诉了使用zbuffer,其实就是把处于后边的物体就不需要渲染了,在背面剔除后,删掉了不需要处理的三角形,但是在像素层面,位于前面的颜色应该把后边的颜色挡住
首先来定义一个zbuffer,我没有使用教程中的一位数组表示,因为我不希望代码理解起来过于复杂
// 定义一个zbuffer,并设置为无穷小std::unique_ptr<std::vector<std::vector<float>>> zBuffer = std::make_unique<std::vector<std::vector<float>>>(width, std::vector<float>(height));auto * zBuffer = new std::vector<std::vector<float>>(width, std::vector<float>(std::numeric_limits<float>::lowest()));
在这种情况下,绘制像素前要先判断当前想要绘制的颜色是否被挡住,至于是大于号还是小于号,看如何定义,当前模型是z越大离屏幕越近
double alpha = signed_triangle_area(x, y, bx, by, cx, cy) / total_area;double beta = signed_triangle_area(x, y, cx, cy, ax, ay) / total_area;double gamma = signed_triangle_area(x, y, ax, ay, bx, by) / total_area;if (alpha<0 || beta<0 || gamma<0) continue; // 说明当前像素不在三角形内部float barycentricZ = alpha*triangle.screenCoords[0].z() + beta*triangle.screenCoords[1].z() + gamma*triangle.screenCoords[2].z();// zbuffer中缓存的渲染物体距离小于当前渲染物体的距离时,才覆盖渲染if (x<width && y < height && zBuffer->at(x).at(y) < barycentricZ){zBuffer->at(x).at(y) = barycentricZ;framebuffer.set(x,y,color);}
当前的整体代码如下
#include "thirdParty/tgaimage.h"
#include "model.h"
#include <vector>
#include <cmath>
#include <iostream>constexpr TGAColor white = {255, 255, 255, 255};
constexpr TGAColor green = { 0, 255, 0, 255};
constexpr TGAColor red = { 255, 0, 0, 255};
constexpr TGAColor blue = {255, 128, 64, 255};
constexpr TGAColor yellow = { 0, 200, 255, 255};
constexpr static int width = 2560;
constexpr static int height = 1920;
// 画线尝试1
void drawLine_first(int ax, int ay, int bx, int by, TGAImage &img, TGAColor color){for(float t = 0;t<=1;t+=0.02){int x = std::round(ax + t * (bx - ax)); // round会进行四舍五入int y = std::round(ay + t * (by - ay));img.set(x,y,color);}
}
// 画线尝试2
void drawLine_second(int ax, int ay, int bx, int by, TGAImage &img, TGAColor color){if (ax>bx) { // make it left−to−rightstd::swap(ax, bx);std::swap(ay, by);}for (int x = ax ; x<= bx; x++) { // 不再以t控制,而是以x的进行进行控制,保证了水平方向上不会有空隙// 如果不加强制转换,当分子分母都是整数时,计算结果的小数部分会被截断float t = (x-ax)/static_cast<float>(bx-ax); // 变换了形式,表示出当x移动一格时,t是多少,int y = std::round( ay + (by-ay)*t );img.set(x, y, color);}
}
// 画线尝试3
void drawLine_third(int ax, int ay, int bx, int by, TGAImage &img, TGAColor color){bool steep = std::abs(ax-bx) < std::abs(ay-by);if (steep) { // if the drawLine is steep, we transpose the imagestd::swap(ax, ay);std::swap(bx, by);}if (ax>bx) { // make it left−to−rightstd::swap(ax, bx);std::swap(ay, by);}for (int x = ax ; x<= bx; x++) { // 不再以t控制,而是以x的进行进行控制,保证了水平方向上不会有空隙// 如果不加强制转换,当分子分母都是整数时,计算结果的小数部分会被截断float t = (x-ax)/static_cast<float>(bx-ax); // 变换了形式,表示出当x移动一格时,t是多少,int y = std::round( ay + (by-ay)*t );if (steep) // if transposed, de−transposeimg.set(y, x, color);elseimg.set(x, y, color);}
}
// 最终版本 对计算进行了优化
void drawLine(int ax, int ay, int bx, int by, TGAImage &framebuffer, TGAColor color) {bool steep = std::abs(ax-bx) < std::abs(ay-by);if (steep) { // if the drawLine is steep, we transpose the imagestd::swap(ax, ay);std::swap(bx, by);}if (ax>bx) { // make it left−to−rightstd::swap(ax, bx);std::swap(ay, by);}int y = ay;int ierror = 0;for (int x=ax; x<=bx; x++) {if (steep) // if transposed, de−transposeframebuffer.set(y, x, color);elseframebuffer.set(x, y, color);ierror += 2 * std::abs(by-ay);y += (by > ay ? 1 : -1) * (ierror > bx - ax);ierror -= 2 * (bx-ax) * (ierror > bx - ax);}
}
// 三角形面积,可能返回负数,表示背对屏幕
double signed_triangle_area(int ax, int ay, int bx, int by, int cx, int cy) {return .5*((by-ay)*(bx+ax) + (cy-by)*(cx+bx) + (ay-cy)*(ax+cx));
}
// 绘制一个三角形
void drawTriangle(Triangle triangle, TGAImage &framebuffer, std::vector<std::vector<float>> * zBuffer,TGAColor color) {float ax = triangle.screenCoords[0].x();float ay = triangle.screenCoords[0].y();float bx = triangle.screenCoords[1].x();float by = triangle.screenCoords[1].y();float cx = triangle.screenCoords[2].x();float cy = triangle.screenCoords[2].y();float bbminx = std::min(std::min(ax, bx), cx);float bbminy = std::min(std::min(ay, by), cy);float bbmaxx = std::max(std::max(ax, bx), cx);float bbmaxy = std::max(std::max(ay, by), cy);// 如果面积为负数,背对屏幕,被裁剪double total_area = signed_triangle_area(ax, ay, bx, by, cx, cy);if (total_area<1) return;#pragma omp parallel forfor (int x=bbminx; x<=bbmaxx; x++) {for (int y=bbminy; y<=bbmaxy; y++) {double alpha = signed_triangle_area(x, y, bx, by, cx, cy) / total_area;double beta = signed_triangle_area(x, y, cx, cy, ax, ay) / total_area;double gamma = signed_triangle_area(x, y, ax, ay, bx, by) / total_area;if (alpha<0 || beta<0 || gamma<0) continue; // 说明当前像素不在三角形内部float barycentricZ = alpha*triangle.screenCoords[0].z() + beta*triangle.screenCoords[1].z() + gamma*triangle.screenCoords[2].z();// zbuffer中缓存的渲染物体距离小于当前渲染物体的距离时,才覆盖渲染if (x<width && y < height && zBuffer->at(x).at(y) < barycentricZ){zBuffer->at(x).at(y) = barycentricZ;framebuffer.set(x,y,color);}}}
}int main() {auto * model = new Model("./obj/african_head/african_head.obj");TGAImage framebuffer(width, height, TGAImage::RGB);// 定义一个zBuffer,并设置全部数据为最小负数auto * zBuffer = new std::vector<std::vector<float>>(width, std::vector<float>(height,std::numeric_limits<float>::lowest()));// 遍历obj文件中的每个三角形for (Triangle triangle : model->triangleList) {// 将当前三角形的三个顶点都投影到屏幕for (int i = 0; i < 3; ++i) triangle.setScreenCoord(i,width,height);// 绘制三角形drawTriangle(triangle, framebuffer, zBuffer, TGAColor(rand()%255, rand()%255, rand()%255, 255));}
// framebuffer.flip_vertically();framebuffer.write_tga_file("framebuffer.tga");return 0;
}
下一步就是把材质贴上去,也就是设置颜色时不再使用随机颜色,而是根据三个顶点的纹理坐标进行插值,获得一个像素点的纹理坐标,从纹理图片对应位置获取颜色来设置
首先得有一个承载材质的类,我这里使用的是TGAImage来读取图片,并把材质类作为Model的成员
#ifndef TINYRENDERER_TEXTURE_H
#define TINYRENDERER_TEXTURE_H
#include <Eigen/Eigen>
#include "thirdParty/tgaimage.h"
class Texture{
private:TGAImage texture;public:Texture(const std::string& name){texture.read_tga_file("");width = texture.width();height = texture.height();}int width, height;TGAColor getColor(float u, float v){auto u_img = u * width;auto v_img = (1 - v) * height;TGAColor color = texture.get(v_img, u_img);return color;}
};
#endif //TINYRENDERER_TEXTURE_H
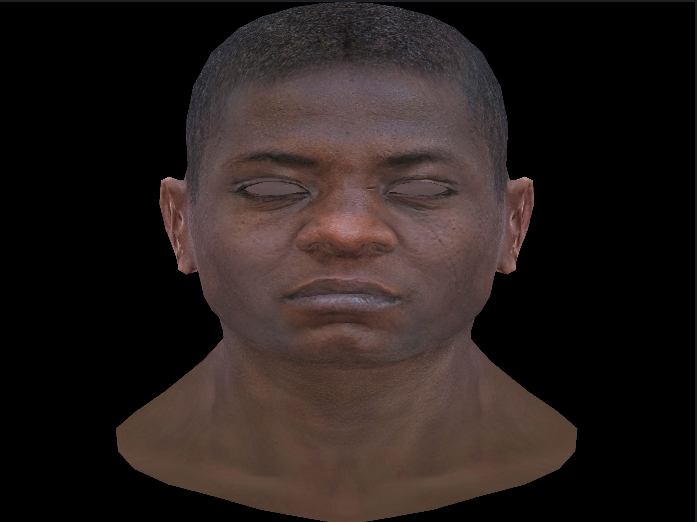
在main中首先对uv坐标进行插值,之后在设置像素颜色时,通过插值的uv坐标,到uv图中找对应位置的颜色
float texU = alpha*triangle.texCoords[0].x() + beta*triangle.texCoords[1].x() + gamma*triangle.texCoords[2].x();float texV = alpha*triangle.texCoords[0].y() + beta*triangle.texCoords[1].y() + gamma*triangle.texCoords[2].y();// zbuffer中缓存的渲染物体距离小于当前渲染物体的距离时,才覆盖渲染if (x<width && y < height && zBuffer->at(x).at(y) < barycentricZ){zBuffer->at(x).at(y) = barycentricZ;framebuffer.set(x,y,texture.getColor(texU,texV));}
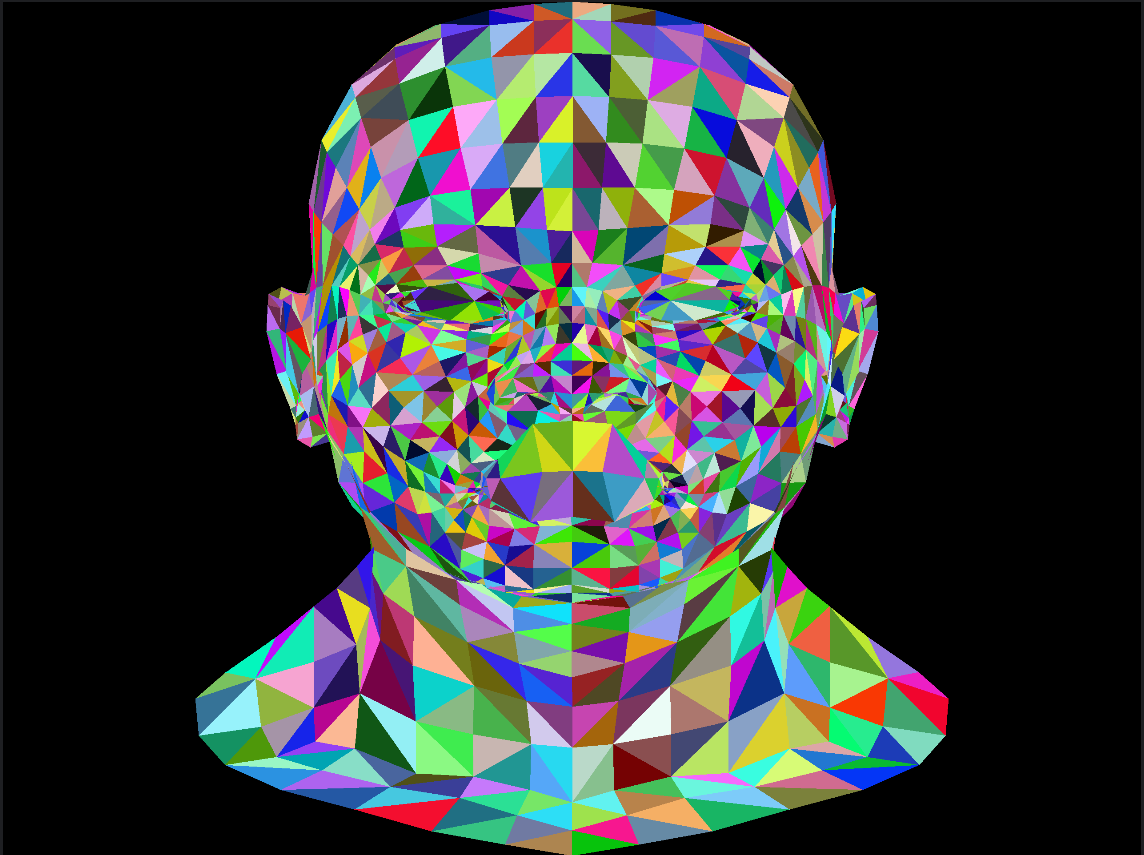
生成效果如下图所示
到目前为止我自己的实现可以在github的分支结点中找到:https://github.com/sdpyy1/CppLearn/tree/56841b79fe7c74bce1d9210f1a42e2a3ca019768/tinyrenderer
Lesson 4: Perspective projection
这里我不希望只完成他课程的简单情况,我直接把MVP矩阵+视口变换全部封装了,详情可查看我的仓库,下边是主要代码
#include "model.h"
#include "thirdParty/OBJ_Loader.h"
Model::Model(const char * objFileName,const char * texFileName) : texture(texFileName){objl::Loader Loader;Loader.LoadFile(objFileName);this->modelMatrix = Eigen::Matrix4f::Identity();this->viewMatrix = Eigen::Matrix4f::Identity();this->projectionMatrix = Eigen::Matrix4f::Identity();for (const auto &mesh: Loader.LoadedMeshes){for(int i=0;i<mesh.Vertices.size();i+=3){Triangle t;for(int j=0;j<3;j++){// 此处设置每个三角形的属性t.setGlobalCoord(j, Vector4f(mesh.Vertices[i + j].Position.X, mesh.Vertices[i + j].Position.Y,mesh.Vertices[i + j].Position.Z, 1.0));t.setNormal(j,Vector3f(mesh.Vertices[i+j].Normal.X,mesh.Vertices[i+j].Normal.Y,mesh.Vertices[i+j].Normal.Z));t.setTexCoord(j,Vector2f(mesh.Vertices[i+j].TextureCoordinate.X, mesh.Vertices[i+j].TextureCoordinate.Y));Matrix4f mvp = projectionMatrix * viewMatrix * modelMatrix;}this->triangleList.push_back(t);}}
}
// 将角度转换为弧度
constexpr float deg2rad(float degrees) {return degrees * M_PI / 180.0f;
}
// 生成绕 x, y, z 轴旋转的变换矩阵
Eigen::Matrix4f rotation(float angleX, float angleY, float angleZ) {// 分别计算绕 x, y, z 轴旋转的矩阵Eigen::Matrix4f rotationX = Eigen::Matrix4f::Identity();float radX = deg2rad(angleX);rotationX(1, 1) = std::cos(radX);rotationX(1, 2) = -std::sin(radX);rotationX(2, 1) = std::sin(radX);rotationX(2, 2) = std::cos(radX);Eigen::Matrix4f rotationY = Eigen::Matrix4f::Identity();float radY = deg2rad(angleY);rotationY(0, 0) = std::cos(radY);rotationY(0, 2) = std::sin(radY);rotationY(2, 0) = -std::sin(radY);rotationY(2, 2) = std::cos(radY);Eigen::Matrix4f rotationZ = Eigen::Matrix4f::Identity();float radZ = deg2rad(angleZ);rotationZ(0, 0) = std::cos(radZ);rotationZ(0, 1) = -std::sin(radZ);rotationZ(1, 0) = std::sin(radZ);rotationZ(1, 1) = std::cos(radZ);// 组合三个旋转矩阵,这里假设旋转顺序为 Z -> Y -> XEigen::Matrix4f modelMatrix = rotationX * rotationY * rotationZ;return modelMatrix;
}
// 生成平移变换矩阵
Eigen::Matrix4f translation(float tx, float ty, float tz) {Eigen::Matrix4f translationMatrix = Eigen::Matrix4f::Identity();translationMatrix(0, 3) = tx;translationMatrix(1, 3) = ty;translationMatrix(2, 3) = tz;return translationMatrix;
}
// 生成缩放变换矩阵
Eigen::Matrix4f scaling(float sx, float sy, float sz) {Eigen::Matrix4f scalingMatrix = Eigen::Matrix4f::Identity();scalingMatrix(0, 0) = sx;scalingMatrix(1, 1) = sy;scalingMatrix(2, 2) = sz;return scalingMatrix;
}
// 视图变换矩阵
Eigen::Matrix4f get_view_matrix(Eigen::Vector3f eye_pos, Eigen::Vector3f target, Eigen::Vector3f up) {// TODO:还没理解怎么换的// 观察方向Vector3f z = (eye_pos - target).normalized();// 叉乘得右方向Vector3f r = z.cross(up).normalized();// 叉乘得上方向Vector3f u = z.cross(r).normalized();Eigen::Matrix4f translate;translate << r.x(),r.y(),r.z(),-r.dot(eye_pos),u.x(),u.y(),u.z(),-u.dot(eye_pos),-z.x(),-z.y(),-z.z(),z.dot(eye_pos),0,0,0,1;// 效果是将摄像机作为原点情况下各个点的坐标return translate;}
Eigen::Matrix4f get_projection_matrix(float eye_fov, float aspect_ratio, float n, float f) {Eigen::Matrix4f projection = Eigen::Matrix4f::Identity();float t = -tan((eye_fov/360)*M_PI)*(abs(n)); //topfloat r = t/aspect_ratio;Eigen::Matrix4f Mp;//透视矩阵Mp <<n, 0, 0, 0,0, n, 0, 0,0, 0, n+f, -n*f,0, 0, 1, 0;Eigen::Matrix4f Mo_tran;//平移矩阵Mo_tran <<1, 0, 0, 0,0, 1, 0, 0, //b=-t;0, 0, 1, -(n+f)/2 ,0, 0, 0, 1;Eigen::Matrix4f Mo_scale;//缩放矩阵Mo_scale <<1/r, 0, 0, 0,0, 1/t, 0, 0,0, 0, 2/(n-f), 0,0, 0, 0, 1;projection = (Mo_scale*Mo_tran)* Mp;//投影矩阵//这里一定要注意顺序,先透视再正交;正交里面先平移再缩放;否则做出来会是一条直线!return projection;
}
void Model::setModelTransformation(float angleX, float angleY, float angleZ, float tx, float ty, float tz, float sx, float sy, float sz){if (triangleList.empty()){std::cout << "模型未导入!"<<std::endl;return;}Eigen::Matrix4f rotationMatrix = rotation(angleX, angleY, angleZ);Eigen::Matrix4f translationMatrix = translation(tx, ty, tz);Eigen::Matrix4f scalingMatrix = scaling(sx, sy, sz);// 按缩放 -> 旋转 -> 平移的顺序组合变换矩阵modelMatrix = translationMatrix * rotationMatrix * scalingMatrix;
}
// 应用视图变换的函数
void Model::setViewTransformation(Eigen::Vector3f eye_pos, Eigen::Vector3f target, Eigen::Vector3f up) {viewMatrix = get_view_matrix(eye_pos,target,up);
}
// 应用透视变换的函数
void Model::setProjectionTransformation(float fovY, float aspectRatio, float near, float far) {projectionMatrix = get_projection_matrix(fovY, aspectRatio, near, far);
}Matrix4f Model::getMVP(){return projectionMatrix * viewMatrix * modelMatrix;
}Model::~Model() {
}











