使用前准备工作
1、新建工作空间、编译功能包
以建立名字为rplidar_ws为例,终端输入
mkdir rplidar_ws
cd rplidar_ws
mkdir src
cd src
catkin_init_workspacerplidar_ros功能包:git下载。
https://github.com/Slamtec/rplidar_ros/然后把解压的rplidar_ros功能包复制到rplidar_ws/src目录下,然后在rplidar_ws的目录下,使用 catkin_make进行编译。
cd ~/rplidar_ws
catkin_make编译通过后,把工作空间的路径添加到.bashrc中
sudo gedit ~/.bashrc把以下内容复制到文件末尾
source ~/rplidar_ws/devel/setup.bash --extend2、绑定雷达端口名称
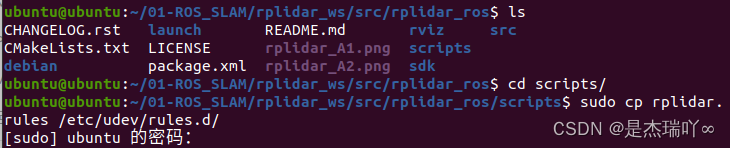
打开终端,输入以下命令,把功能包下的oradar.rules文件复制到/etc/udev/rules.d中。
 然后重新拔插雷达串口,终端输入 ll /dev/rplidar
然后重新拔插雷达串口,终端输入 ll /dev/rplidar
ll /dev/rplidar出现以下内容则表示绑定成功,结尾不一定是0,根据插入设备的顺序而改变。
3、测试雷达
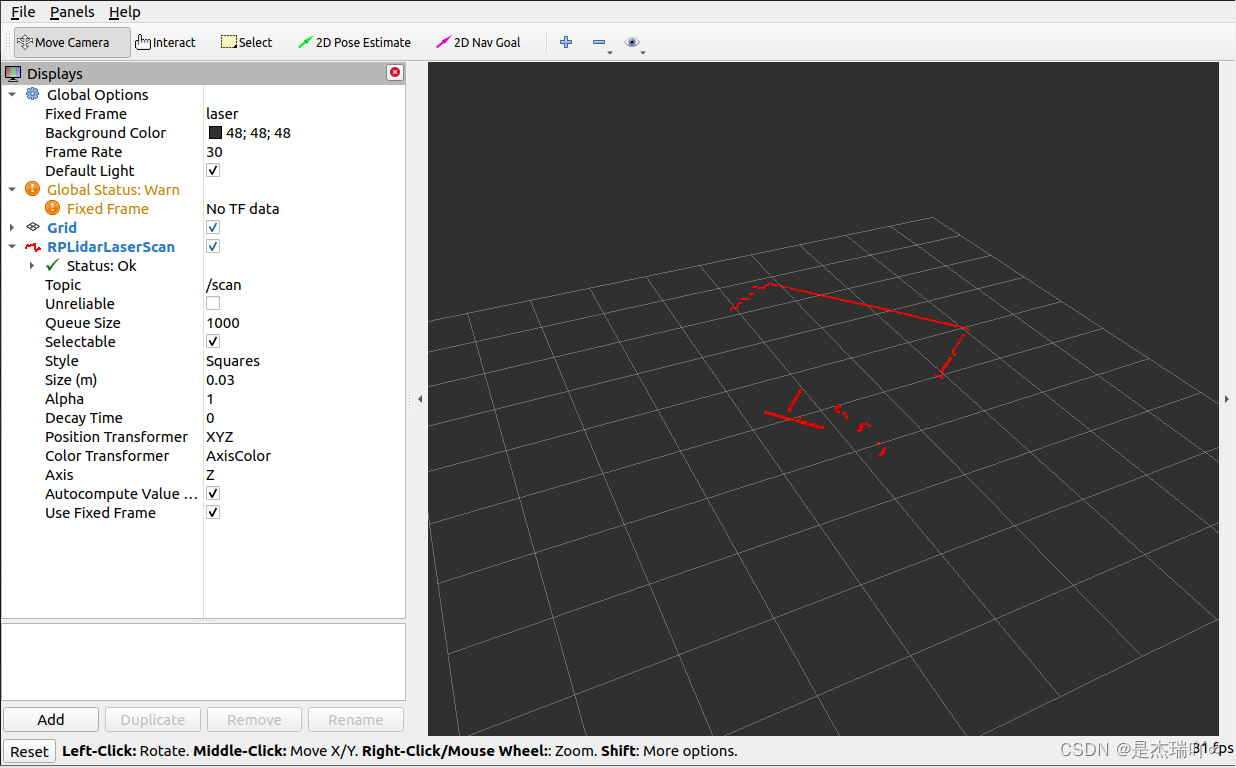
保存后退出,重新打开一个终端,输入以下语句,打开雷达并且在rviz中显示
#a1雷达
roslaunch rplidar_ros view_rplidar_a1.launch
#a2雷达
roslaunch rplidar_ros view_rplidar_a2m12.launch
#a3雷达
roslaunch rplidar_ros view_rplidar_a3.launch
#s2雷达/s2l雷达
roslaunch rplidar_ros view_rplidar_s2.launch
#c1雷达
roslaunch rplidar_ros view_rplidar_c1.launch如果输入雷达启动名命令,出现 错误提示:(原因:没有没配置环境)
ubuntu@ubuntu:~/01-ROS_SLAM/rplidar_ws$ roslaunch rplidar_ros view_rplidar_c1.launch
RLException: [view_rplidar_c1.launch] is neither a launch file in package [rplidar_ros] nor is [rplidar_ros] a launch file name
The traceback for the exception was written to the log file以下为解决办法:
1. 检查软件包是否存在:
确保 rplidar_ros 软件包确实存在于您的 src 目录下。您可以通过在终端中运行以下命令来检查:
cd ~/01-ROS_SLAM/rplidar_ws/src
ls这将列出 src 目录下的所有文件和文件夹,您可以检查 rplidar_ros 是否在其中
2. 初始化工作空间:
如果 rplidar_ros 软件包存在于 src 目录下,您需要初始化 ROS 工作空间并构建它。在 rplidar_ws 目录下运行以下命令:这将编译工作空间中的所有软件包。
cd ~/01-ROS_SLAM/rplidar_ws
catkin_make3. 设置环境变量:
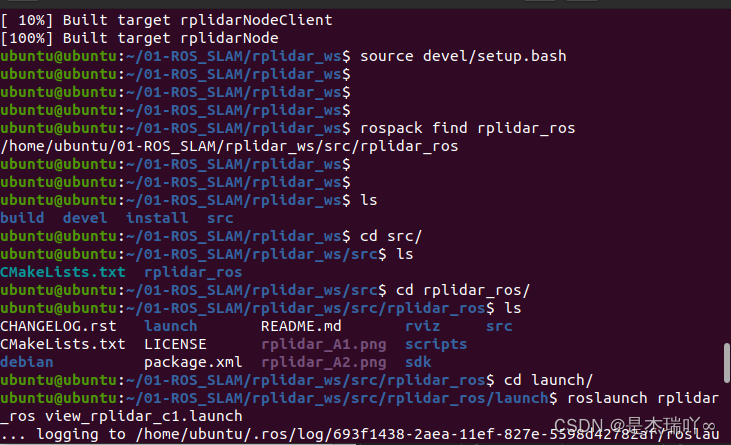
编译完成后,您需要设置环境变量以确保 ROS 能够识别新编译的软件包。运行以下命令:
source devel/setup.bash如果您在不同的终端会话中工作,可能需要在每次打开新终端时都运行这个命令,或者将其添加到您的 .bashrc 文件中:
echo "source ~/01-ROS_SLAM/rplidar_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc4. 重新检查软件包:
设置好环境变量后,再次运行 rospack find rplidar_ros 命令来检查软件包是否被正确识别。
如果上述步骤仍然无法解决问题,可能需要检查
rplidar_ros软件包的安装过程,确保遵循了正确的安装指南。如果软件包是从源代码编译的,确保所有依赖项都已正确安装。如果软件包是通过apt-get或rosdep安装的,确保安装命令正确无误。
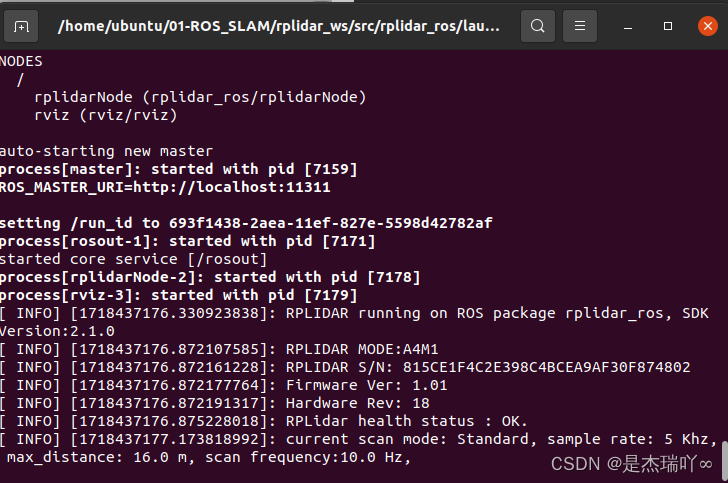
4. 终端输入下面命令,开启C1雷达
roslaunch rplidar_ros view_rplidar_c1.launch