
目录
一、什么是快速排序
二、代码实现
2.1 hoare版本
2.1.1 思路
2.1.2 C语言源码
2.2 挖坑法
2.2.1 思路
2.2.2 C语言源码
2.3 前后指针版本
2.3.1 思路
2.3.2 C语言源码
编辑
三、效率优化
3.0 时间复杂度分析
3.1 三数取中法
3.2 小区间优化
四、非递归写法
4.1 思路
4.2 C语言源码
一、什么是快速排序
快速排序是Hoare于1962年提出的一种二叉树结构的交换排序方法。
它的基本思想为:
- 任取待排序元素序列中的某元素作为基准值,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值。
- 然后最左右子序列重复该过程,直到所有元素都排列在相应位置上为止。
二、代码实现
2.1 hoare版本
2.1.1 思路
采取先部分后整体的思路进行讲解
- 考虑单次
- 右指针先去找比基准值小的的位置
- 左指针去找比基准值大的位置
- 两个位置进行交换
- 重复上述过程,直到左指针等于右指针。此时实现了相遇位置左边的值都小于基准值,右边的值都大于基准值。
- 按照基本思想,将此相遇位置与基准值进行交换。就完成了单趟排序
- 考虑整体
- 采用类似二分法的思路,不断分成小的区间
- 停止二分的条件是:左右区间重合(即左区间的值等于右区间)或者 区间不存在(即左区间的值大于右区间)
- 每次递归传值:右区间为[起始位置,相遇位置的前一个位置];左区间为[相遇位置的后一个位置,结束位置]
2.1.2 C语言源码
void Hoare(int* a, int left, int right)
{//递归结束条件if (left >= right){return;}int begin = left;int end = right;//单趟while (begin < end){//先右取小while (begin < end && a[end] > a[left]){end--;}//后左取大while (begin < end && a[begin] <= a[left]){begin++;}//交换Swap(&a[begin], &a[end]);}Swap(&a[begin], &a[left]);//递归//左区间Hoare(a, left, begin - 1);//右区间Hoare(a, begin + 1, right);
}2.2 挖坑法
2.2.1 思路
挖坑法提出的目的是解决Hoare版本不易于理解的问题,算法效率上没有任何提升。
- 考虑单次:
- 将基准值存起来。
- 右指针找小,放入原先坑位,形成新的坑位。
- 左指针找大,放入原先坑位,形成新的坑位。
- 最后将相遇位置的坑位放入基准值
- 考虑整体:
- 与Hoare版本递归思路如出一辙,不再进行详细讲解
2.2.2 C语言源码
void DigHole(int* a, int left, int right)
{if (left >= right){return;}int key = a[left];int begin = left;int end = right;while (begin < end){//先从右找出比key小的值while (begin < end && a[end] > key){end--;}//放到坑位上a[begin] = a[end];//再从左找出比key大的值while (begin < end && a[begin] <= key){begin++;}//放到坑位上a[end] = a[begin];}a[begin] = key;//左区间DigHole(a, left, begin - 1);//右区间DigHole(a, begin + 1, right);
}2.3 前后指针版本
2.3.1 思路
前后指针版本大大节约了代码量,是推荐的快速排序实现的版本
- 考虑单次:
- prev指针指向起始位置,cur指针指向prev的下一个位置
- 如果cur指向的值小于基准值,1.prev先向前移动 2.然后与cur指针指向的位置交换 3.最后cur指针移动到下一个位置(实际上没有进行交换,仅仅是cur指针与prev指针一起移动到下一个位置)
- 如果cur指针指向的值大于基准值,cur指针一直移动直到找到比基准值小的位置为止。将此位置与prev指针指向的下一个位置交换。
- 最后将prev指向的位置与基准值位置交换
- 结束条件是cur指针越界
- 考虑整体:
- 与Hoare版本递归思路如出一辙,不再进行详细讲解
2.3.2 C语言源码
void DoublePoint(int* a, int left, int right)
{if (left >= right){return;}int prev = left;int cur = left + 1;int keyi = left;while (cur <= right){if (a[cur]<a[keyi] && ++prev != cur){Swap(&a[prev], &a[cur]);}cur++;}Swap(&a[keyi], &a[prev]);keyi = prev;//左区间DoublePoint(a, left, keyi - 1);//右区间DoublePoint(a, keyi + 1, right);
}
三、效率优化
3.0 时间复杂度分析
一般情况下的时间复杂度类似于二叉树的时间复杂度计算为 O(nlogn)
最坏的情况下,即为给定数组本身是有序的,仍然需要分区间来交换。此时的情况类比于极端的单叉树,时间复杂度为O(n^2)
所以基准值的选择是提高快速排序效率的关键,下述的三数取中法就是解决方法之一
3.1 三数取中法
每次取出区间端点以及区间中点的值比较,取中间值,这样就可以规避上述问题
int GetMidi(int* a, int left, int right)
{int midi = (left + right) / 2;int maxi = 0;if (a[left] < a[midi]){if (a[midi] < a[right]){return midi;}else if(a[left] < a[right]){return right;}else{return left;}}else{if (a[midi] > a[right]){return midi;}else if (a[left] < a[right]){return left;}else{return right;}}
}3.2 小区间优化
综合选取一个时间复杂度、空间复杂度较小且稳定性高的排序——插入排序
具体讲解请点击:常见排序算法之插入排序-CSDN博客
四、非递归写法
递归需要创建栈帧,极端情况下可能会导致栈溢出。所以采用模拟递归版本实现快速排序是非常必要的
4.1 思路
快速排序采用递归的本质目的是存储了每次排序的区间,递归到最小区间然后逐层解决问题。很明显栈的先进后出的特性满足我们的需求。
栈的源码及详解请点击:数据结构之栈-CSDN博客
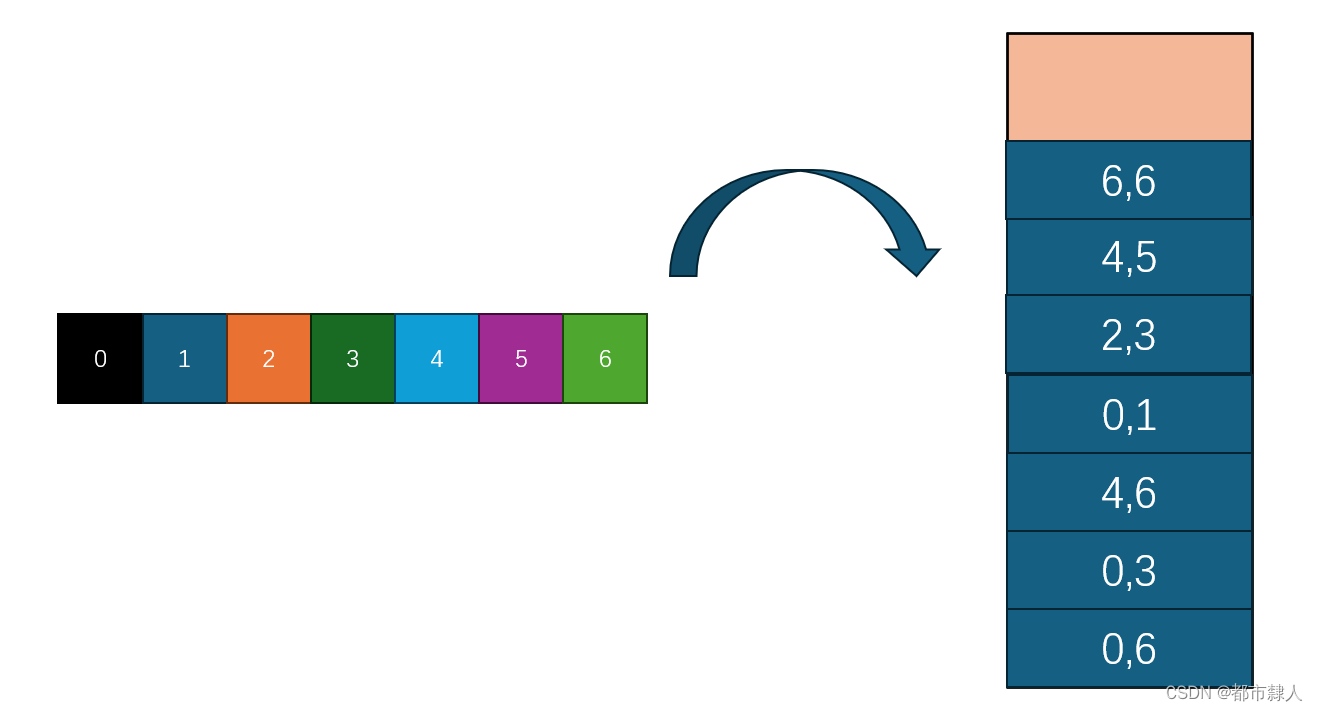
- 考虑单次
- 左右区间入栈
- 左右区间出栈
- 采用上述三个版本中的一个进行单趟排序(下述代码采用了双指针版本)
- 考虑循环
- 满足成为一个区间的条件(即左端点小于右端点),继续将左右区间入栈
- 先处理左区间,再处理右区间
- 循环结束条件为:栈内没有元素——即所有区间都处理完毕
4.2 C语言源码
void QuickSort(int* a, int left, int right)
{ST st;STInit(&st);STPush(&st, right);STPush(&st, left);while (STEmpty(&st)==false){int begin = STTop(&st);STPop(&st);int end = STTop(&st);STPop(&st);//单趟int prev = begin;int cur = begin + 1;int keyi = begin;while (cur <= end){if (a[cur] < a[keyi] && ++prev != cur){Swap(&a[prev], &a[cur]);}cur++;}Swap(&a[keyi], &a[prev]);keyi = prev;//模拟递归//左区间if (keyi + 1 < end){STPush(&st, end);STPush(&st, keyi+1);}//右区间if (begin < keyi - 1){STPush(&st, keyi - 1);STPush(&st, begin);}}STDestroy(&st);
}











