平台:matlab r2021b,vivado2023.1
本文知识内容摘自《软件无线电原理和应用》
调频(FM)是载波的瞬时频率随调制信号成线性变化的一种调制方式,音频调频信号的数学表达式可以写为:
Fm频率调制,载波的幅度随着调制波形的幅度变化而变化。
其中为载波频率,
为调制信号,
为调制角频率。
下面是FM调制的matlab实现
clc;
clear;
% 设置参数
fs = 312.5e6; % 采样率
fc = 20e6; % 载波频率
fm = 1e6; % 调制信号频率,内调制最大3mhz
t1 = 0:1/fs:2; % 时间序列,1微秒
t = t1(1:5000); %RW需要取整数计算出的频率是真实
% 生成调制信号
m = cos(2*pi*fm*t);%正弦波
% m = square(2*pi*fm*t);%方波
% m = sawtooth(2*pi*fm*t, 0.5);%三角波
% m = sawtooth(2*pi*fm*t);% 锯齿波
% 例如,y=x^2;t=1-5;
% Q=cumtrapa(t,y);
% q0=0;
% q1=0.5*(4+1)+0=2.5;
% q2=0.5*(9+3)+2.5=9;
% q3=0.5*(16+9)+9=21.5;
% q4=0.5*(25+16)+21.5=42;
% 计算积分累计积分结果,返回一个向量
integral_term = cumtrapz(t, m);% 生成载波信号
c = cos(2*pi*fc*t);
% FM调制,
kf = 100e6; % 调频系数
k = 2*pi*fc*t;
k1= kf*integral_term;
s = cos(2*pi*fc*t + kf*integral_term);
% 绘制时域波形
figure(1);
subplot(3,1,1);
plot(t*1e6, m);
title('调制信号');
xlabel('时间 (μs)');
ylabel('幅度');subplot(3,1,2);
plot(t*1e6, c);
title('载波信号');
xlabel('时间 (μs)');
ylabel('幅度');subplot(3,1,3);
plot(t*1e6, s);
title('调制后信号');
xlabel('时间 (μs)');
ylabel('幅度');figure(2);
subplot(1,1,1);
plot(t*1e6, c, 'r', 'LineWidth', 2); % 使用红色绘制载波信号,线条宽度为2
title('载波信号');
xlabel('时间 (μs)');
ylabel('幅度');
hold on;plot(t*1e6, s, 'k', 'LineWidth', 2); % 使用黑色绘制调制后信号,线条宽度为2
title('调制后信号');
xlabel('时间 (μs)');
ylabel('幅度');% 绘制频域波形
figure(3);
% 计算频谱
N = length(t);
f = (-fs/2:fs/N:fs/2-fs/N); % 频率向量
M = fftshift(fft(m));
C = fftshift(fft(c));
S = fftshift(fft(s));subplot(3,1,1);
plot(f, abs(M)/N,'b');
title('调制信号频谱');
xlabel('频率 (GHz)');
ylabel('幅度');subplot(3,1,2);
plot(f, abs(C)/N,'g');
title('载波信号频谱');
xlabel('频率 (GHz)');
ylabel('幅度');subplot(3,1,3);
plot(f, abs(S)/N,'r');
title('调制后信号频谱');
xlabel('频率 (GHz)');
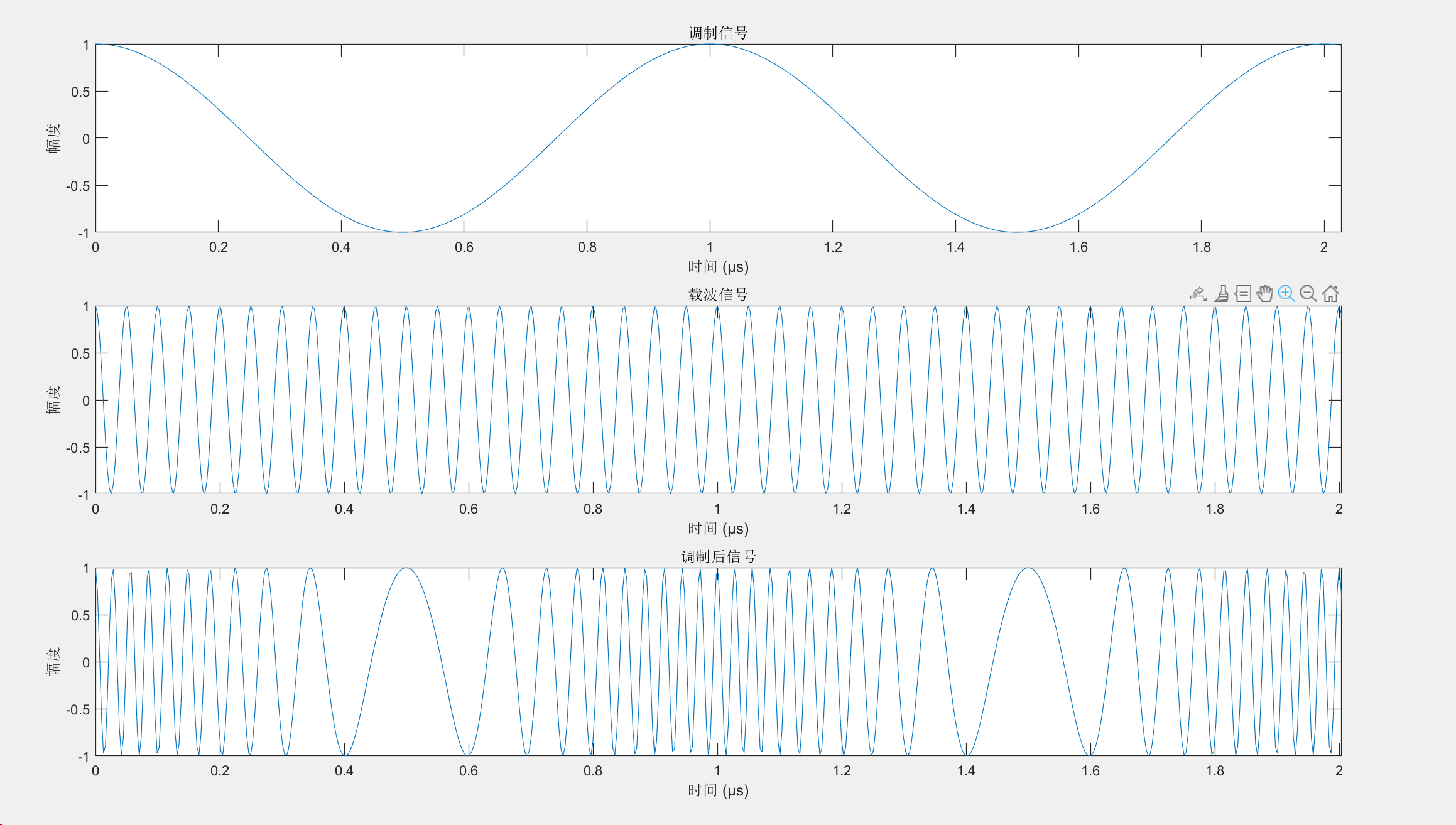
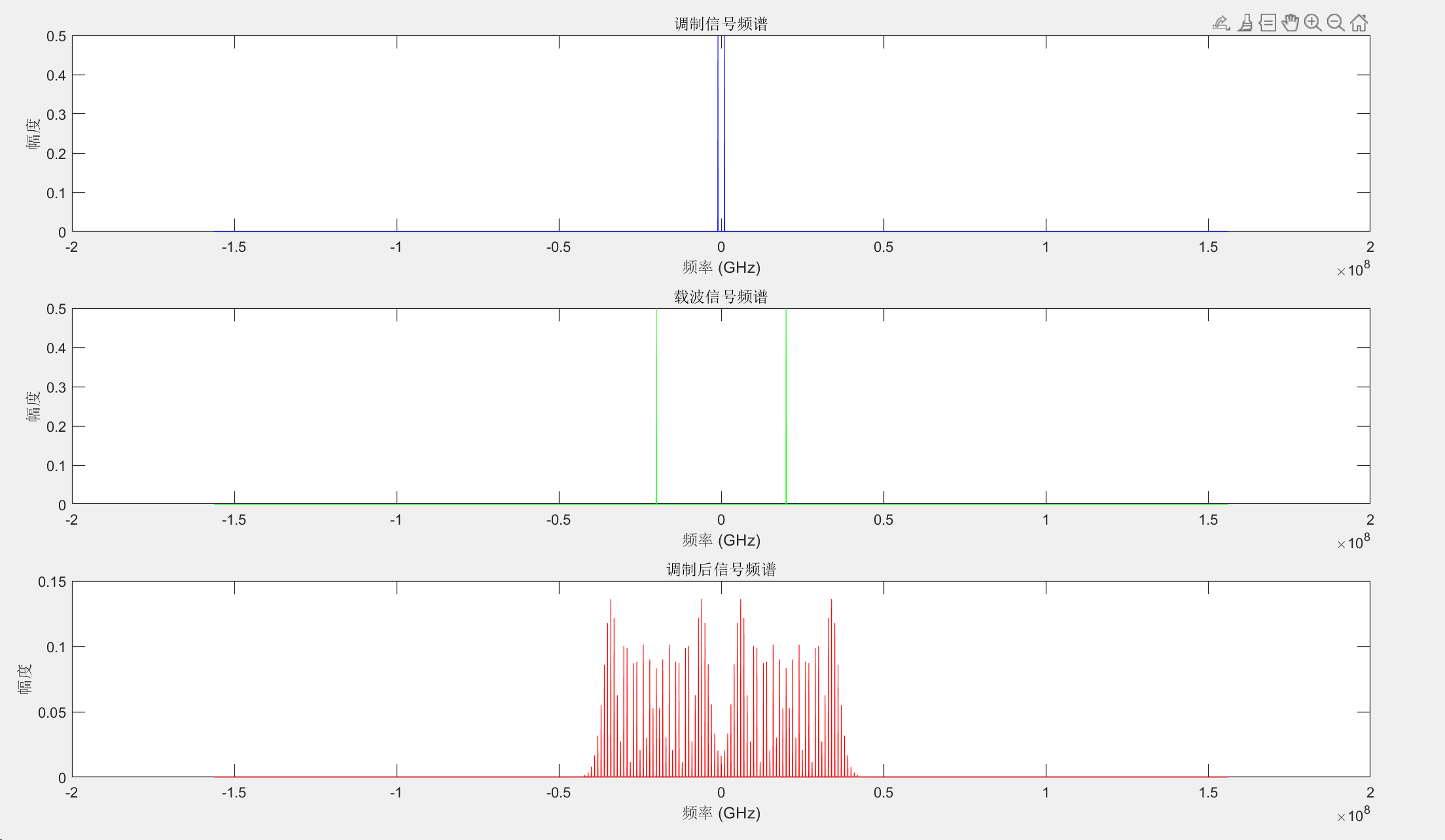
ylabel('幅度');调制波为余弦波时时域和频域图像
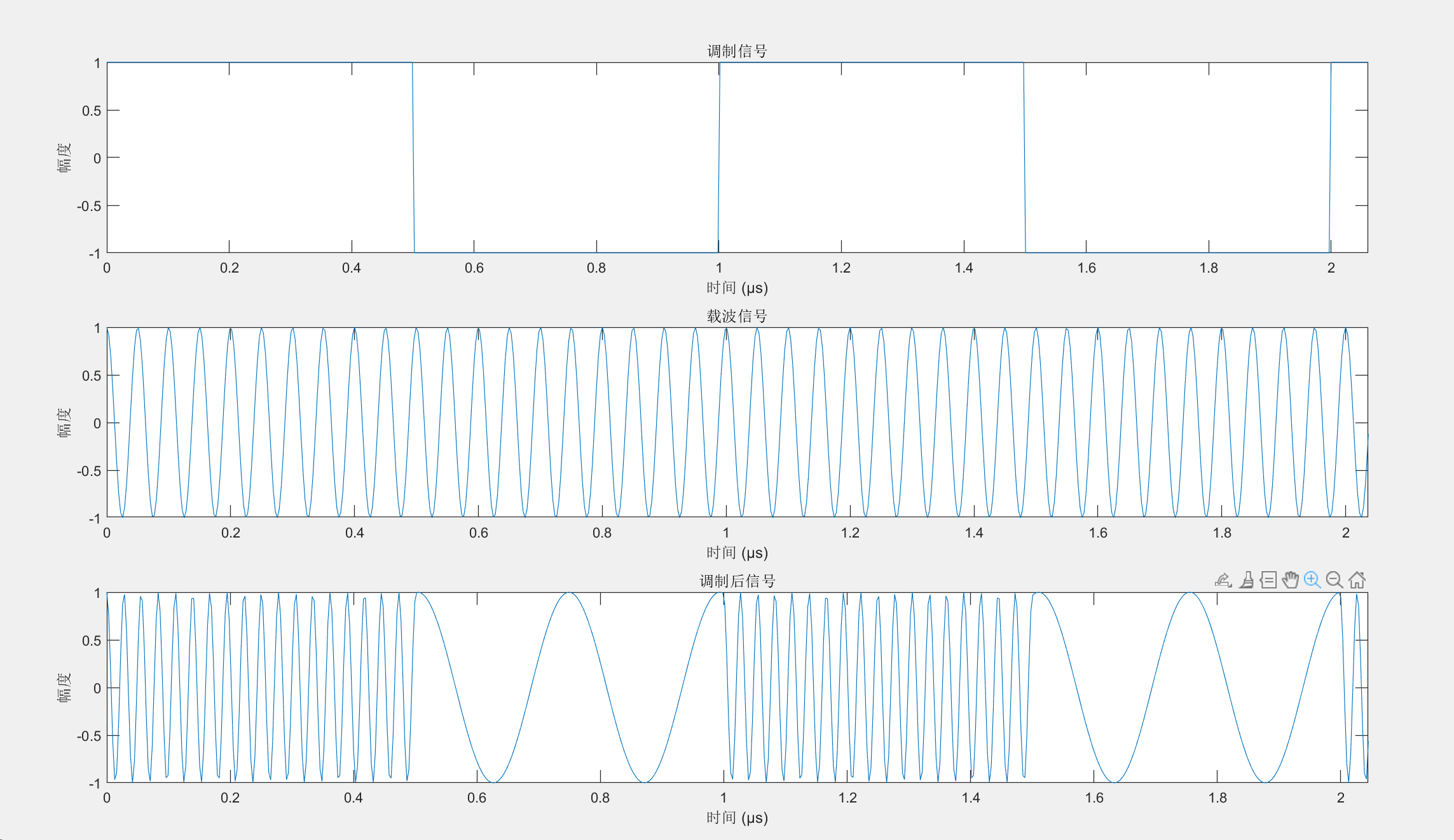
当调制信号为方波时。
为锯齿波时

FPGA的实现
当我们的调制波是一个余弦波时。
可以看到我们的调制波形是一个余弦波。载波也是一个余弦波,调制波的频率随着调制波形的积
分变化而变化。其变化规律如下。
余弦波时,积分量在0,pi和2pi时最小,对应着在0时频偏最小,在pi/2时频率与载波相同,在pi时
频偏正向最大。在3*pi/2时又与载波频率相同。在2pi时达到了最小频偏。
在逻辑中有几种产生正余弦波形的方式,基于DDS的波形发生器,基于cordic的波形发生器。这里我们使用cordic来产生我们的载波和调制波。
关于cordic的频率控制字这里说明一下。Cordic是你对其输入一个角度,他给你计算出y(cos,sin)的一个结果。所以我们需要对频率控制字执行一个累加的过程。其中cordic的角度范围表示为(-pi,pi)。

关于输出的频率计算公式为
其中为输出频率,phase为相位控制字,
为采样率。
是因为cordic将数据的范围量化到(-pi,pi)。
所以我们需要控制cordic的累加量
其中p为频率控制字,pi为载波的频率控制字,po为频偏控制字。
例如我们要载波为fi,最大频偏为fo。假定现在的采样率时钟为fs。根据公式
可以算出载波的频率控制字为
可以算出最大频偏控制字为
所以又调制波的幅度最大为16’h4000=16’d16384表示最大为正1v。
所以po与幅度的对应关系为
所以最大频偏和调制波幅度的关系为
其中x为调制波幅度
逻辑实现现在假定调制波为1mhz,载波为8MHZ,最大频偏为2MHZ,采样率为512MHZ。
插入FPGA代码
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2024/06/06 21:09:44
// Design Name:
// Module Name: vtf_cordic
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//module vtf_cordic;reg aclk;
reg rst_n;
reg s_axis_phase_tvalid;
reg [15 : 0] s_axis_phase_tdata;
reg [15 : 0] s_axis_phase_tdata_0;wire m_axis_dout_tvalid;
wire [31 : 0] m_axis_dout_tdata;wire [15:0] sin ;
wire [15:0] cos ;
wire [15:0] sin0 ;
wire [15:0] cos0 ;cordic_0 u_cordic_0 (.aclk (aclk ),// input wire aclk.s_axis_phase_tvalid (s_axis_phase_tvalid ),// input wire s_axis_phase_tvalid.s_axis_phase_tdata (s_axis_phase_tdata ),// input wire [15 : 0] s_axis_phase_tdata.m_axis_dout_tvalid (m_axis_dout_tvalid ),// output wire m_axis_dout_tvalid.m_axis_dout_tdata ({sin,cos} )// output wire [31 : 0] m_axis_dout_tdata
);cordic_0 u_cordic_1 (.aclk (aclk ),// input wire aclk.s_axis_phase_tvalid (s_axis_phase_tvalid ),// input wire s_axis_phase_tvalid.s_axis_phase_tdata (s_axis_phase_tdata_0 ),// input wire [15 : 0] s_axis_phase_tdata.m_axis_dout_tvalid ( ),// output wire m_axis_dout_tvalid.m_axis_dout_tdata ({sin0,cos0} )// output wire [31 : 0] m_axis_dout_tdata
);initial
beginaclk =0;rst_n =0;#100;rst_n =1;#100;s_axis_phase_tvalid =1;endreg [15:0] wave_add;
reg [15:0] phase_tdata;
reg [15:0] phase_tdata_0;
//产生一个载波
always@(posedge aclk or negedge rst_n)
beginif(rst_n == 1'b0)beginwave_add <= 16'b0;endelse beginwave_add <= 16'd32;end
end
always@(posedge aclk or negedge rst_n)
beginif(rst_n == 1'b0)beginphase_tdata <= 16'b0;endelse beginphase_tdata <= phase_tdata + wave_add;end
end
always@(posedge aclk or negedge rst_n)
beginif(rst_n == 1'b0)beginphase_tdata_0 <= 16'b0;endelse if(phase_tdata >= 16'h0 && phase_tdata <= 16'h4000 )beginphase_tdata_0 <= phase_tdata;endelse if(phase_tdata > 16'h4000 && phase_tdata <= 16'h8000 )beginphase_tdata_0 <= phase_tdata - 16'h4000;endelse if(phase_tdata > 16'h8000 && phase_tdata <= 16'hc000 )beginphase_tdata_0 <= phase_tdata - 16'h8000;endelse if(phase_tdata > 16'hc000 && phase_tdata <= 16'hffff )beginphase_tdata_0 <= phase_tdata - 16'hc000;endelse beginphase_tdata_0 <= phase_tdata;end
end
always@(posedge aclk or negedge rst_n)
beginif(rst_n == 1'b0)begins_axis_phase_tdata <= 16'b0;endelse begins_axis_phase_tdata <= 16'he000 + phase_tdata_0;end
end//-------------------------------------------------------------------
reg [15:0] wave_add_m;
reg [15:0] phase_tdat_m;
reg [15:0] phase_tdata_0_m;wire [15:0] sinsin={sin[15],sin[15],sin[15],sin[15],sin[15],sin[15],sin[15],sin[15],sin[15:8]};
//产生一个方波
always@(posedge aclk or negedge rst_n)
beginif(rst_n == 1'b0)beginwave_add_m <= 16'b0;endelse beginwave_add_m <= sinsin + 16'd262;end
end
always@(posedge aclk or negedge rst_n)
beginif(rst_n == 1'b0)beginphase_tdat_m <= 16'b0;endelse beginphase_tdat_m <= phase_tdat_m + wave_add_m;end
end
always@(posedge aclk or negedge rst_n)
beginif(rst_n == 1'b0)beginphase_tdata_0_m <= 16'b0;endelse if(phase_tdat_m >= 16'h0 && phase_tdat_m <= 16'h4000 )beginphase_tdata_0_m <= phase_tdat_m;endelse if(phase_tdat_m > 16'h4000 && phase_tdat_m <= 16'h8000 )beginphase_tdata_0_m <= phase_tdat_m - 16'h4000;endelse if(phase_tdat_m > 16'h8000 && phase_tdat_m <= 16'hc000 )beginphase_tdata_0_m <= phase_tdat_m - 16'h8000;endelse if(phase_tdat_m > 16'hc000 && phase_tdat_m <= 16'hffff )beginphase_tdata_0_m <= phase_tdat_m - 16'hc000;endelse beginphase_tdata_0_m <= phase_tdat_m;end
end
always@(posedge aclk or negedge rst_n)
beginif(rst_n == 1'b0)begins_axis_phase_tdata_0 <= 16'b0;endelse begins_axis_phase_tdata_0 <= 16'he000 + phase_tdata_0_m;end
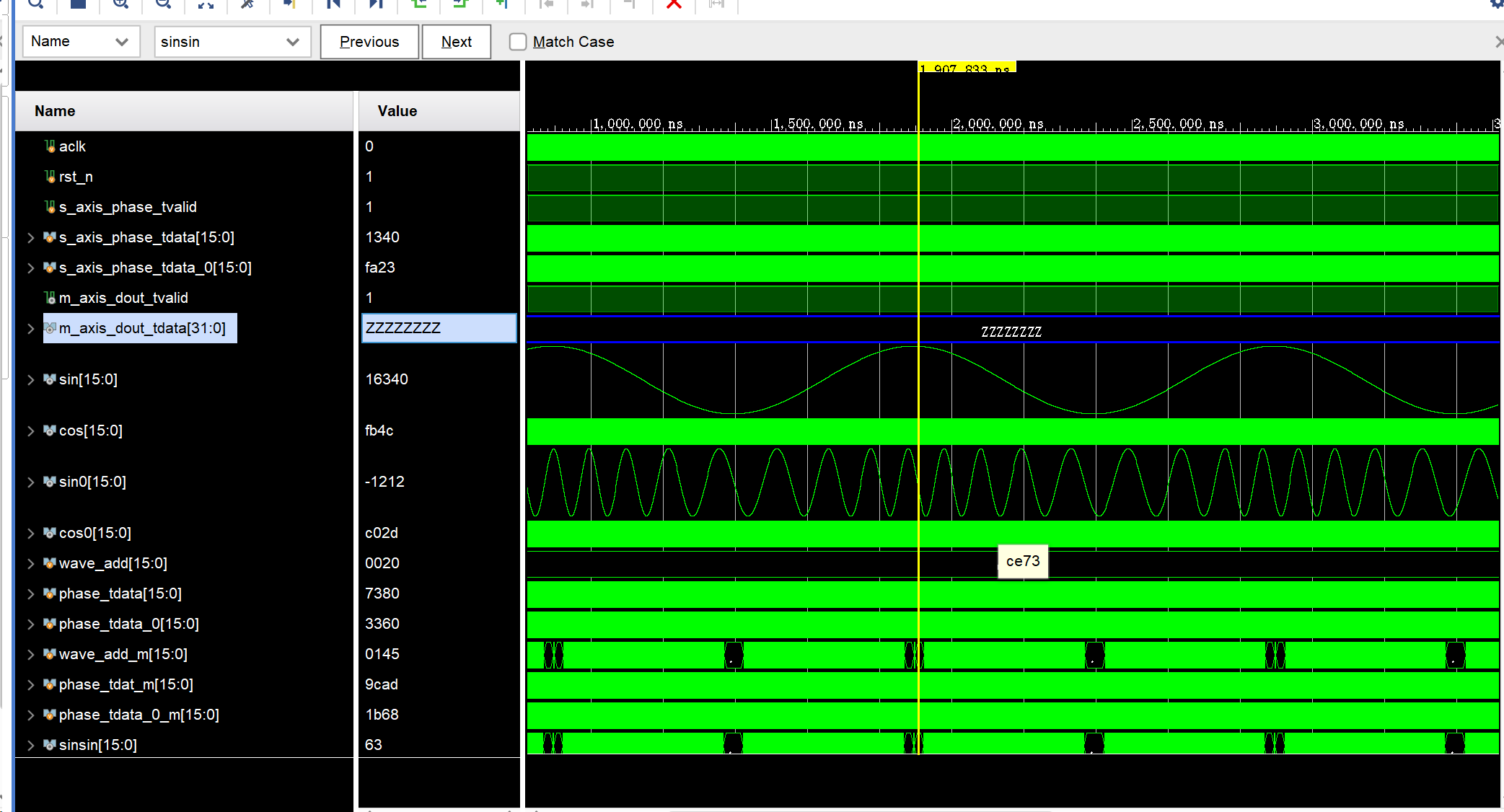
endalways#0.977 aclk = ~aclk;endmodule仿真为